 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLRKDNet: Speeding up Lane Detection with Knowledge Distillation
Paper and Code
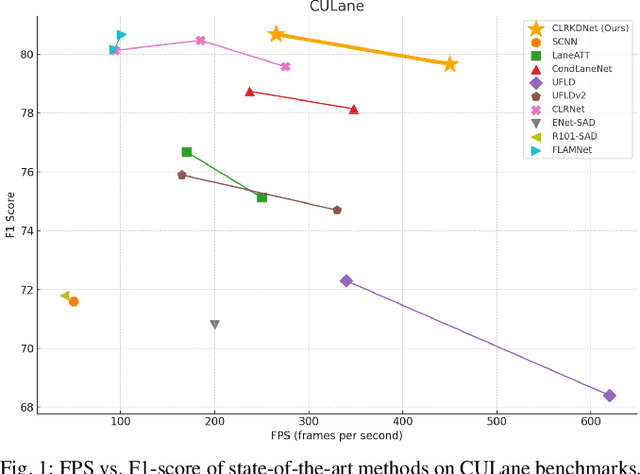
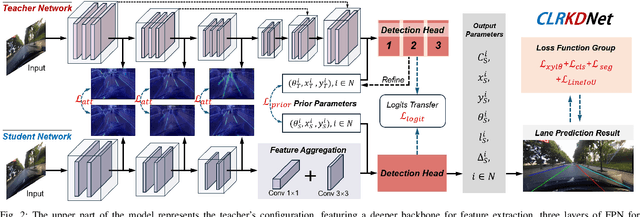
Road lanes are integral components of the visual perception systems in intelligent vehicles, playing a pivotal role in safe navigation. In lane detection tasks, balancing accuracy with real-time performance is essential, yet existing methods often sacrifice one for the other. To address this trade-off, we introduce CLRKDNet, a streamlined model that balances detection accuracy with real-time performance. The state-of-the-art model CLRNet has demonstrated exceptional performance across various datasets, yet its computational overhead is substantial due to its Feature Pyramid Network (FPN) and muti-layer detection head architecture. Our method simplifies both the FPN structure and detection heads, redesigning them to incorporate a novel teacher-student distillation process alongside a newly introduced series of distillation losses. This combination reduces inference time by up to 60% while maintaining detection accuracy comparable to CLRNet. This strategic balance of accuracy and speed makes CLRKDNet a viable solution for real-time lane detection tasks in autonomous driving applications.