 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosed-Loop Next-Best-View Planning for Target-Driven Grasping
Paper and Code
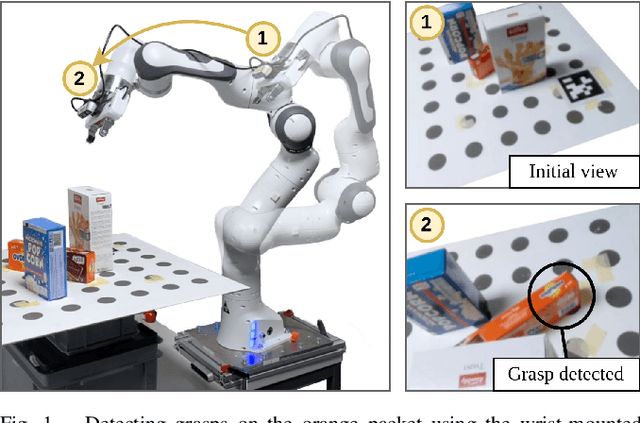
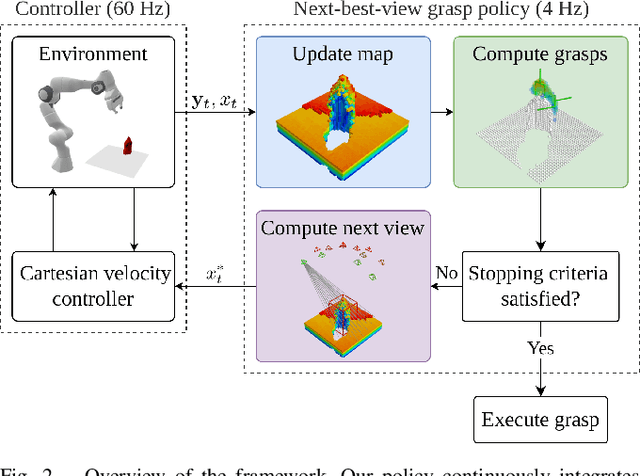

Picking a specific object from clutter is an essential component of many manipulation tasks. Partial observations often require the robot to collect additional views of the scene before attempting a grasp. This paper proposes a closed-loop next-best-view planner that drives exploration based on occluded object parts. By continuously predicting grasps from an up-to-date scene reconstruction, our policy can decide online to finalize a grasp execution or to adapt the robot's trajectory for further exploration. We show that our reactive approach decreases execution times without loss of grasp success rates compared to common camera placements and handles situations where the fixed baselines fail. Video and code are available at https://github.com/ethz-asl/active_grasp.