 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLIC: Curriculum Learning and Imitation for feature Control in non-rewarding environments
Paper and Code
Jan 31, 2019

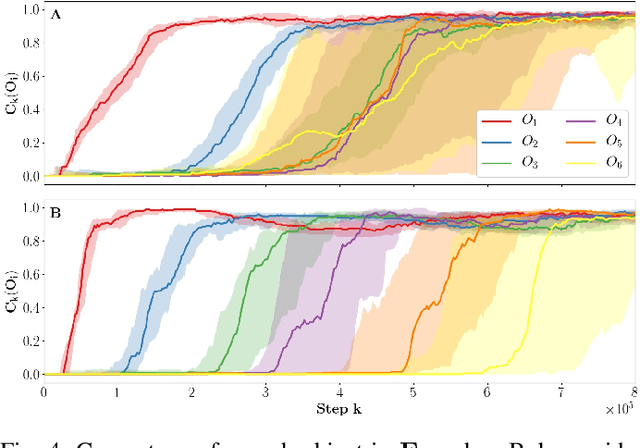
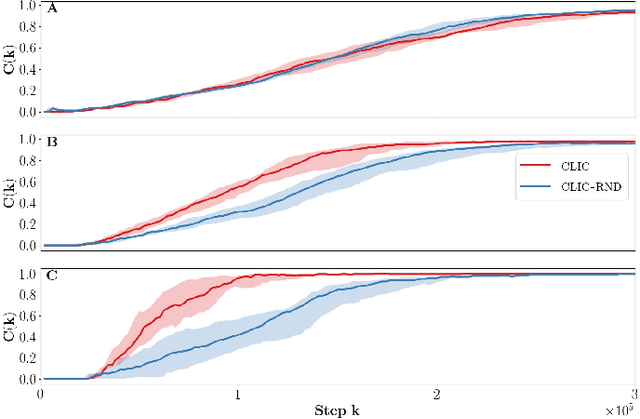
In this paper, we propose an unsupervised reinforcement learning agent called CLIC for Curriculum Learning and Imitation for Control. This agent learns to control features in its environment without external rewards, and observes the actions of a third party agent, Bob, who does not necessarily provide explicit guidance. CLIC selects which feature to train on and what to imitate from Bob's behavior by maximizing its learning progress. We show that CLIC can effectively identify helpful behaviors in Bob's actions, and imitate them to control the environment faster. CLIC can also follow Bob when he acts as a mentor and provides ordered demonstrations. Finally, when Bob controls features than the agent cannot, or in presence of a hierarchy between aspects of the environment, we show that CLIC ignores non-reproducible and already mastered behaviors, resulting in a greater benefit from imitation.