 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCheap or Robust? The Practical Realization of Self-Driving Wheelchair Technology
Paper and Code
Jul 13, 2018
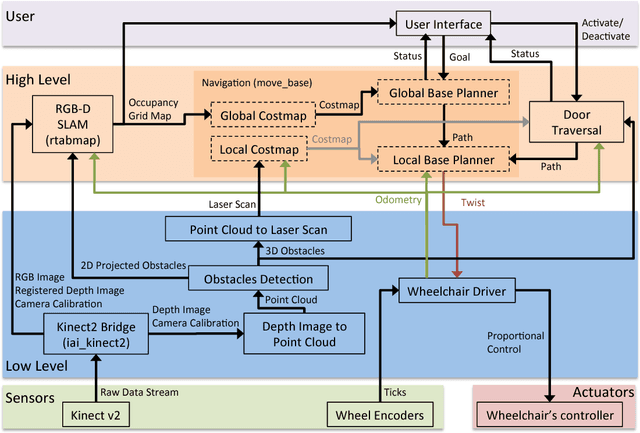
To date, self-driving experimental wheelchair technologies have been either inexpensive or robust, but not both. Yet, in order to achieve real-world acceptance, both qualities are fundamentally essential. We present a unique approach to achieve inexpensive and robust autonomous and semi-autonomous assistive navigation for existing fielded wheelchairs, of which there are approximately 5 million units in Canada and United States alone. Our prototype wheelchair platform is capable of localization and mapping, as well as robust obstacle avoidance, using only a commodity RGB-D sensor and wheel odometry. As a specific example of the navigation capabilities, we focus on the single most common navigation problem: the traversal of narrow doorways in arbitrary environments. The software we have developed is generalizable to corridor following, desk docking, and other navigation tasks that are either extremely difficult or impossible for people with upper-body mobility impairments.