 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCGAR: Critic Guided Action Redistribution in Reinforcement Leaning
Paper and Code
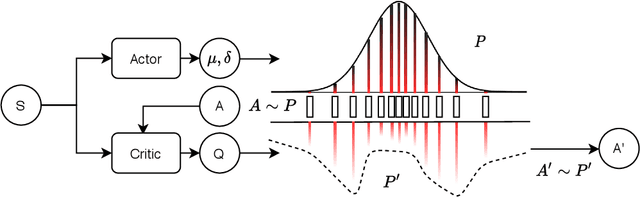
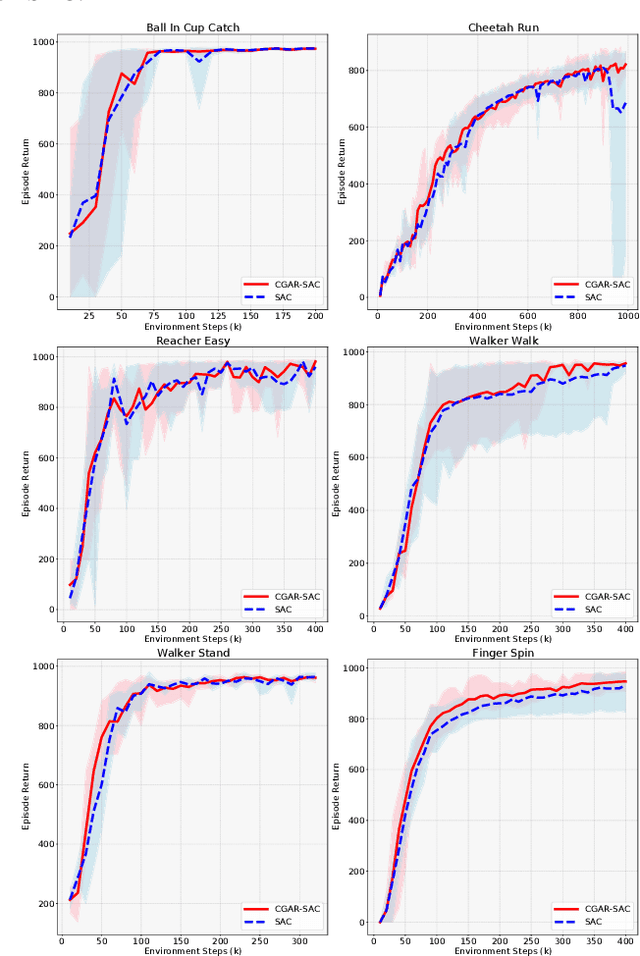

Training a game-playing reinforcement learning agent requires multiple interactions with the environment. Ignorant random exploration may cause a waste of time and resources. It's essential to alleviate such waste. As discussed in this paper, under the settings of the off-policy actor critic algorithms, we demonstrate that the critic can bring more expected discounted rewards than or at least equal to the actor. Thus, the Q value predicted by the critic is a better signal to redistribute the action originally sampled from the policy distribution predicted by the actor. This paper introduces the novel Critic Guided Action Redistribution (CGAR) algorithm and tests it on the OpenAI MuJoCo tasks. The experimental results demonstrate that our method improves the sample efficiency and achieves state-of-the-art performance. Our code can be found at https://github.com/tairanhuang/CGAR.