 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCatlNet: Learning Communication and Coordination Policies from CaTL+ Specifications
Paper and Code
Nov 30, 2022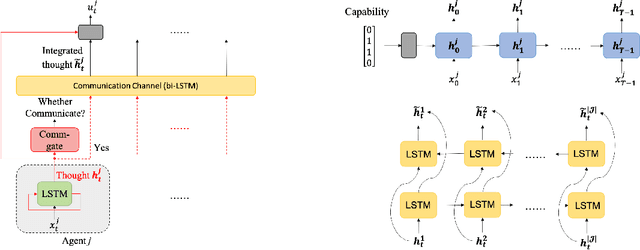
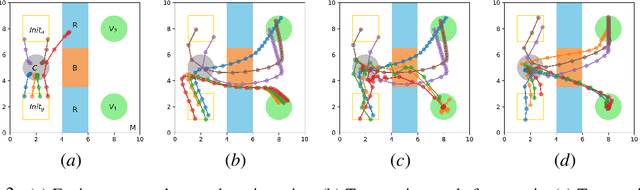
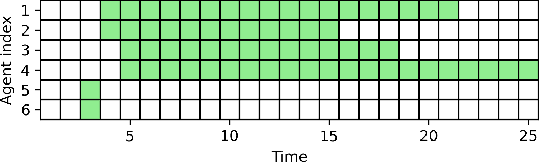
In this paper, we propose a learning-based framework to simultaneously learn the communication and distributed control policies for a heterogeneous multi-agent system (MAS) under complex mission requirements from Capability Temporal Logic plus (CaTL+) specifications. Both policies are trained, implemented, and deployed using a novel neural network model called CatlNet. Taking advantage of the robustness measure of CaTL+, we train CatlNet centrally to maximize it where network parameters are shared among all agents, allowing CatlNet to scale to large teams easily. CatlNet can then be deployed distributedly. A plan repair algorithm is also introduced to guide CatlNet's training and improve both training efficiency and the overall performance of CatlNet. The CatlNet approach is tested in simulation and results show that, after training, CatlNet can steer the decentralized MAS system online to satisfy a CaTL+ specification with a high success rate.