 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCategory-Level Global Camera Pose Estimation with Multi-Hypothesis Point Cloud Correspondences
Paper and Code
Sep 28, 2022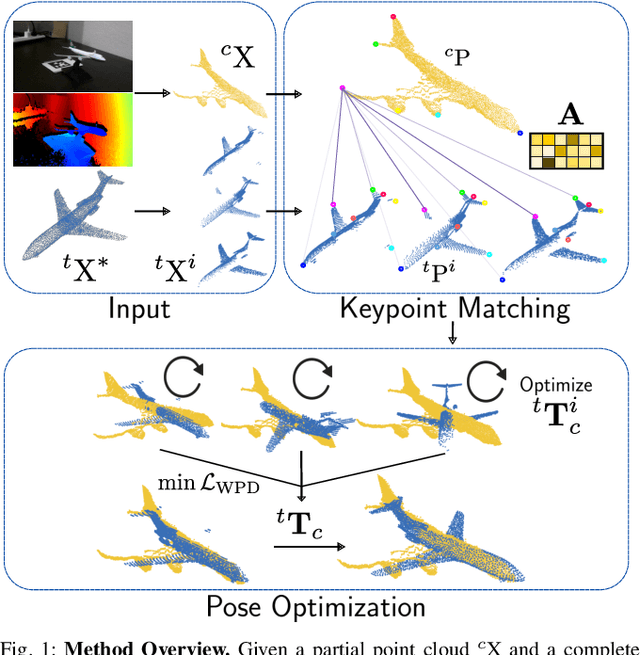
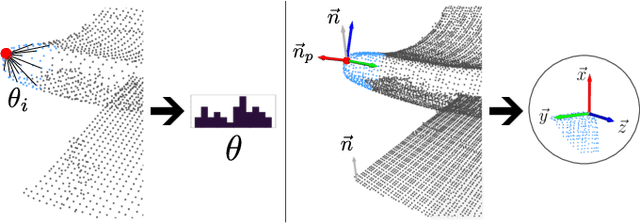
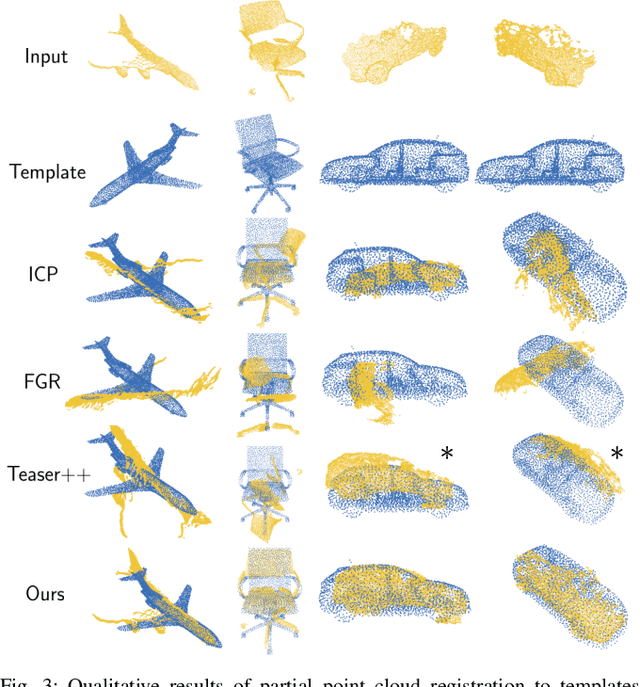
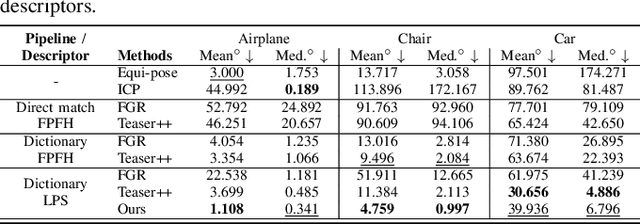
Correspondence search is an essential step in rigid point cloud registration algorithms. Most methods maintain a single correspondence at each step and gradually remove wrong correspondances. However, building one-to-one correspondence with hard assignments is extremely difficult, especially when matching two point clouds with many locally similar features. This paper proposes an optimization method that retains all possible correspondences for each keypoint when matching a partial point cloud to a complete point cloud. These uncertain correspondences are then gradually updated with the estimated rigid transformation by considering the matching cost. Moreover, we propose a new point feature descriptor that measures the similarity between local point cloud regions. Extensive experiments show that our method outperforms the state-of-the-art (SoTA) methods even when matching different objects within the same category. Notably, our method outperforms the SoTA methods when registering real-world noisy depth images to a template shape by up to 20% performance.