 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCascaded Non-local Neural Network for Point Cloud Semantic Segmentation
Paper and Code
Jul 30, 2020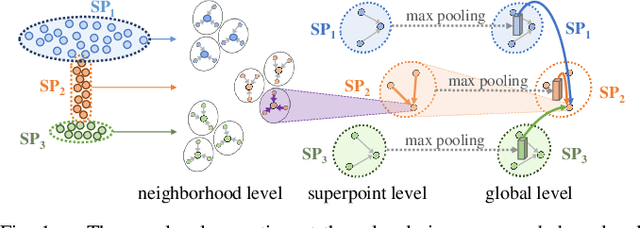
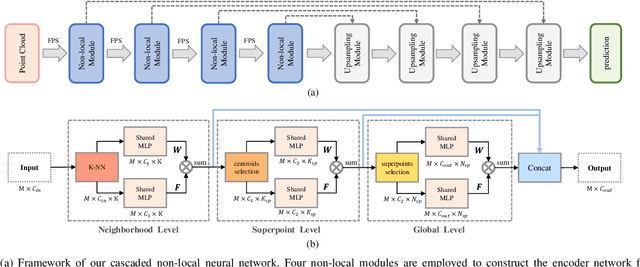
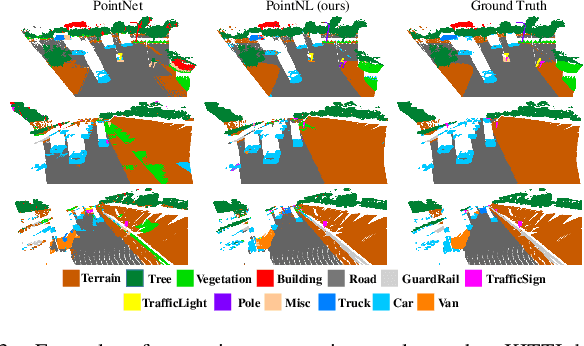
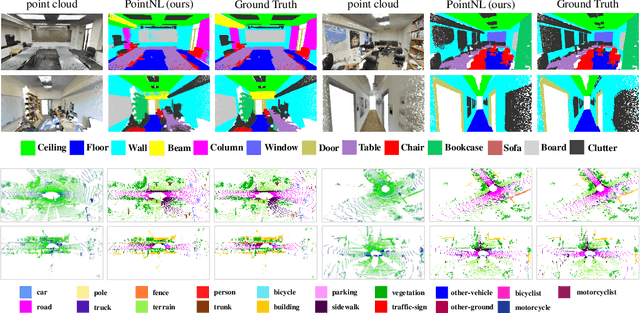
In this paper, we propose a cascaded non-local neural network for point cloud segmentation. The proposed network aims to build the long-range dependencies of point clouds for the accurate segmentation. Specifically, we develop a novel cascaded non-local module, which consists of the neighborhood-level, superpoint-level and global-level non-local blocks. First, in the neighborhood-level block, we extract the local features of the centroid points of point clouds by assigning different weights to the neighboring points. The extracted local features of the centroid points are then used to encode the superpoint-level block with the non-local operation. Finally, the global-level block aggregates the non-local features of the superpoints for semantic segmentation in an encoder-decoder framework. Benefiting from the cascaded structure, geometric structure information of different neighborhoods with the same label can be propagated. In addition, the cascaded structure can largely reduce the computational cost of the original non-local operation on point clouds. Experiments on different indoor and outdoor datasets show that our method achieves state-of-the-art performance and effectively reduces the time consumption and memory occupation.