 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCaRTS: Causality-driven Robot Tool Segmentation from Vision and Kinematics Data
Paper and Code
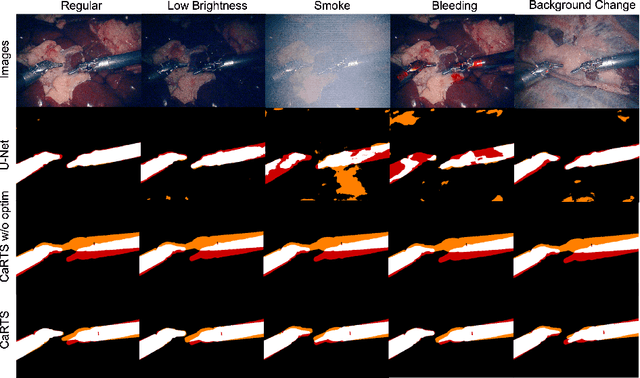

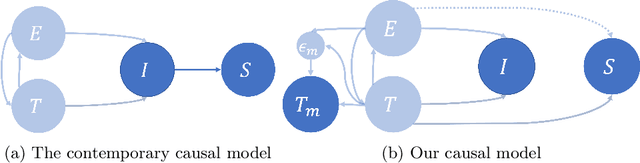

Vision-based segmentation of the robotic tool during robot-assisted surgery enables downstream applications, such as augmented reality feedback, while allowing for inaccuracies in robot kinematics. With the introduction of deep learning, many methods were presented to solve instrument segmentation directly and solely from images. While these approaches made remarkable progress on benchmark datasets, fundamental challenges pertaining to their robustness remain. We present CaRTS, a causality-driven robot tool segmentation algorithm, that is designed based on a complementary causal model of the robot tool segmentation task. Rather than directly inferring segmentation masks from observed images, CaRTS iteratively aligns tool models with image observations by updating the initially incorrect robot kinematic parameters through forward kinematics and differentiable rendering to optimize image feature similarity end-to-end. We benchmark CaRTS with competing techniques on both synthetic as well as real data from the dVRK, generated in precisely controlled scenarios to allow for counterfactual synthesis. On training-domain test data, CaRTS achieves a Dice score of 93.4 that is preserved well (Dice score of 91.8) when tested on counterfactual altered test data, exhibiting low brightness, smoke, blood, and altered background patterns. This compares favorably to Dice scores of 95.0 and 62.8, respectively, of a purely image-based method trained and tested on the same data. Future work will involve accelerating CaRTS to achieve video framerate and estimating the impact occlusion has in practice. Despite these limitations, our results are promising: In addition to achieving high segmentation accuracy, CaRTS provides estimates of the true robot kinematics, which may benefit applications such as force estimation.