 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCancellation-Free Regret Bounds for Lagrangian Approaches in Constrained Markov Decision Processes
Paper and Code
Jun 12, 2023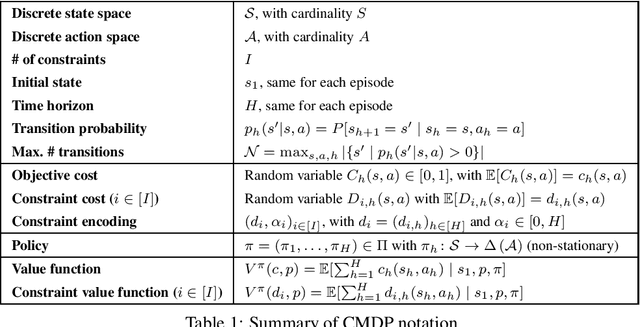
Constrained Markov Decision Processes (CMDPs) are one of the common ways to model safe reinforcement learning problems, where the safety objectives are modeled by constraint functions. Lagrangian-based dual or primal-dual algorithms provide efficient methods for learning in CMDPs. For these algorithms, the currently known regret bounds in the finite-horizon setting allow for a \textit{cancellation of errors}; that is, one can compensate for a constraint violation in one episode with a strict constraint satisfaction in another episode. However, in practical applications, we do not consider such a behavior safe. In this paper, we overcome this weakness by proposing a novel model-based dual algorithm \textsc{OptAug-CMDP} for tabular finite-horizon CMDPs. Our algorithm is motivated by the augmented Lagrangian method and can be performed efficiently. We show that during $K$ episodes of exploring the CMDP, our algorithm obtains a regret of $\tilde{O}(\sqrt{K})$ for both the objective and the constraint violation. Unlike existing Lagrangian approaches, our algorithm achieves this regret without the need for the cancellation of errors.