 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanadian Adverse Driving Conditions Dataset
Paper and Code

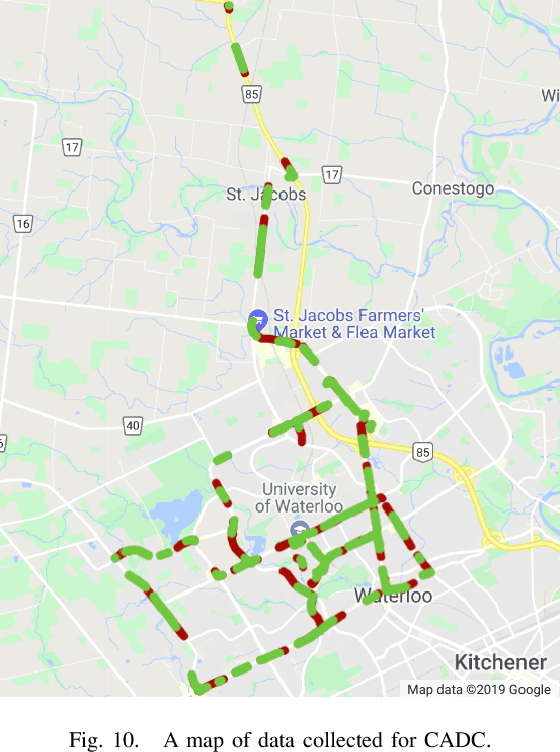
The Canadian Adverse Driving Conditions (CADC) dataset was collected with the Autonomoose autonomous vehicle platform, based on a modified Lincoln MKZ. The dataset, collected during winter within the Region of Waterloo, Canada, is the first autonomous vehicle dataset that focuses on adverse driving conditions specifically. It contains 7,000 frames collected through a variety of winter weather conditions of annotated data from 8 cameras (Ximea MQ013CG-E2), Lidar (VLP-32C) and a GNSS+INS system (Novatel OEM638). The sensors are time synchronized and calibrated with the intrinsic and extrinsic calibrations included in the dataset. Lidar frame annotations that represent ground truth for 3D object detection and tracking have been provided by Scale AI.