 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding Trust Profiles in Conditionally Automated Driving
Paper and Code
Jun 28, 2023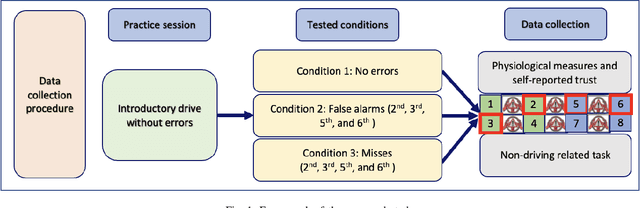
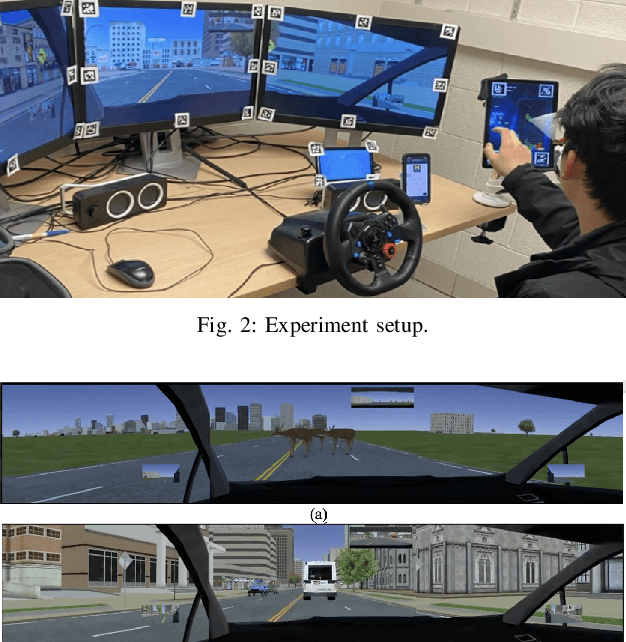
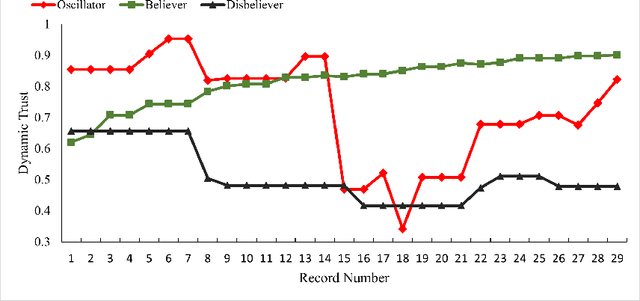
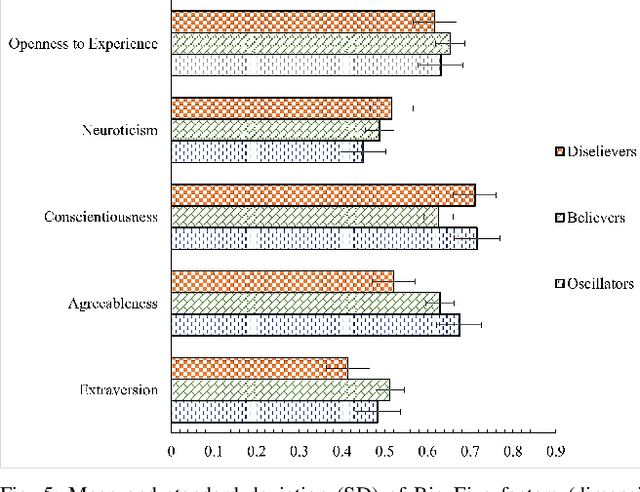
Trust is crucial for ensuring the safety, security, and widespread adoption of automated vehicles (AVs), and if trust is lacking, drivers and the public may not be willing to use them. This research seeks to investigate trust profiles in order to create personalized experiences for drivers in AVs. This technique helps in better understanding drivers' dynamic trust from a persona's perspective. The study was conducted in a driving simulator where participants were requested to take over control from automated driving in three conditions that included a control condition, a false alarm condition, and a miss condition with eight takeover requests (TORs) in different scenarios. Drivers' dispositional trust, initial learned trust, dynamic trust, personality, and emotions were measured. We identified three trust profiles (i.e., believers, oscillators, and disbelievers) using a K-means clustering model. In order to validate this model, we built a multinomial logistic regression model based on SHAP explainer that selected the most important features to predict the trust profiles with an F1-score of 0.90 and accuracy of 0.89. We also discussed how different individual factors influenced trust profiles which helped us understand trust dynamics better from a persona's perspective. Our findings have important implications for designing a personalized in-vehicle trust monitoring and calibrating system to adjust drivers' trust levels in order to improve safety and experience in automated driving.