 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoosting Object Recognition in Point Clouds by Saliency Detection
Paper and Code
Nov 06, 2019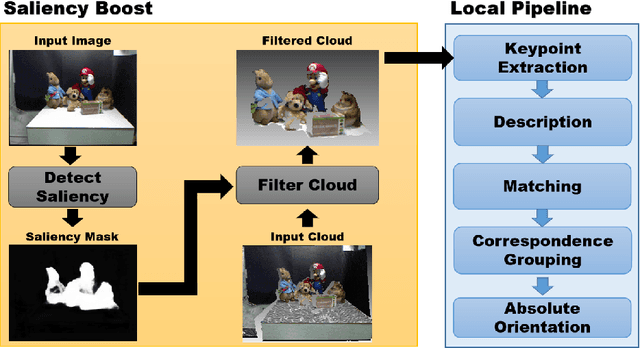

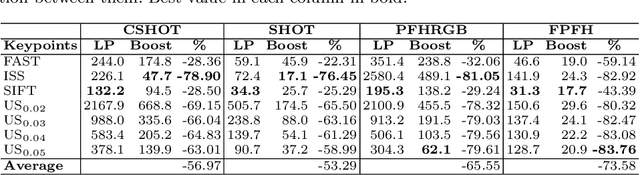
Object recognition in 3D point clouds is a challenging task, mainly when time is an important factor to deal with, such as in industrial applications. Local descriptors are an amenable choice whenever the 6 DoF pose of recognized objects should also be estimated. However, the pipeline for this kind of descriptors is highly time-consuming. In this work, we propose an update to the traditional pipeline, by adding a preliminary filtering stage referred to as saliency boost. We perform tests on a standard object recognition benchmark by considering four keypoint detectors and four local descriptors, in order to compare time and recognition performance between the traditional pipeline and the boosted one. Results on time show that the boosted pipeline could turn out up to 5 times faster, with the recognition rate improving in most of the cases and exhibiting only a slight decrease in the others. These results suggest that the boosted pipeline can speed-up processing time substantially with limited impacts or even benefits in recognition accuracy.