 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiAIT*: Symmetrical Bidirectional Optimal Path Planning with Adaptive Heuristic
Paper and Code
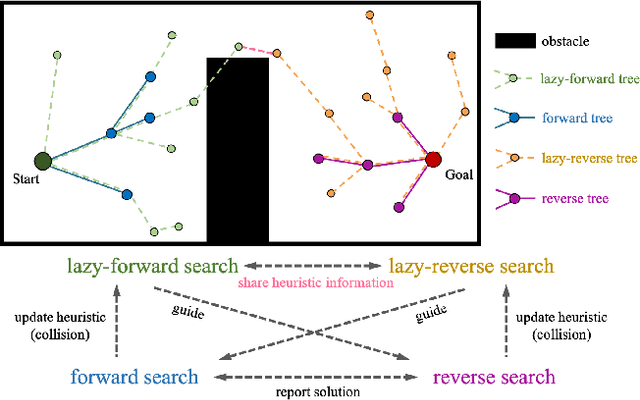

Adaptively Informed Trees (AIT*) develops the problem-specific heuristic under the current topological abstraction of the state space with a lazy-reverse tree that is constructed without collision checking. AIT* can avoid unnecessary searching with the heuristic, which significantly improves the algorithm performance, especially when collision checking is expensive. However, the heuristic estimation in AIT* consumes lots of computation resources, and its asymmetric bidirectional searching strategy cannot fully exploit the potential of the bidirectional method. In this article, we extend AIT* from the asymmetric bidirectional search to the symmetrical bidirectional search, namely BiAIT*. Both the heuristic and space searching in BiAIT* are calculated bidirectionally. The path planner can find the initial solution faster with our proposed method. In addition, when a collision happens, BiAIT* can update the heuristic with less computation. Simulations are carried out to evaluate the performance of the proposed algorithm, and the results show that our algorithm can find the solution faster than the state of the arts. We also analyze the reason for different performances between BiAIT* and AIT*. Furthermore, we discuss two simple but effective modifications to fully exploit the potential of the adaptively heuristic method.