 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBDIS-SLAM: A lightweight CPU-based dense stereo SLAM for surgery
Paper and Code
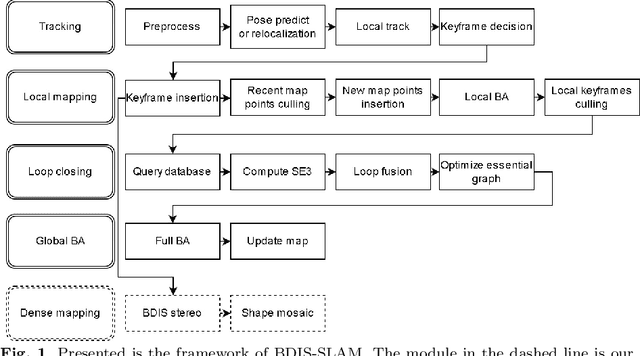
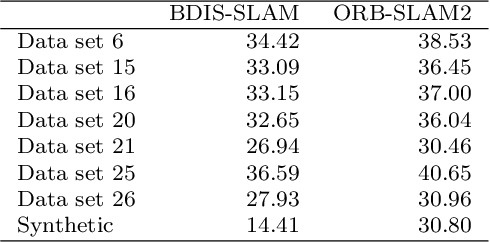
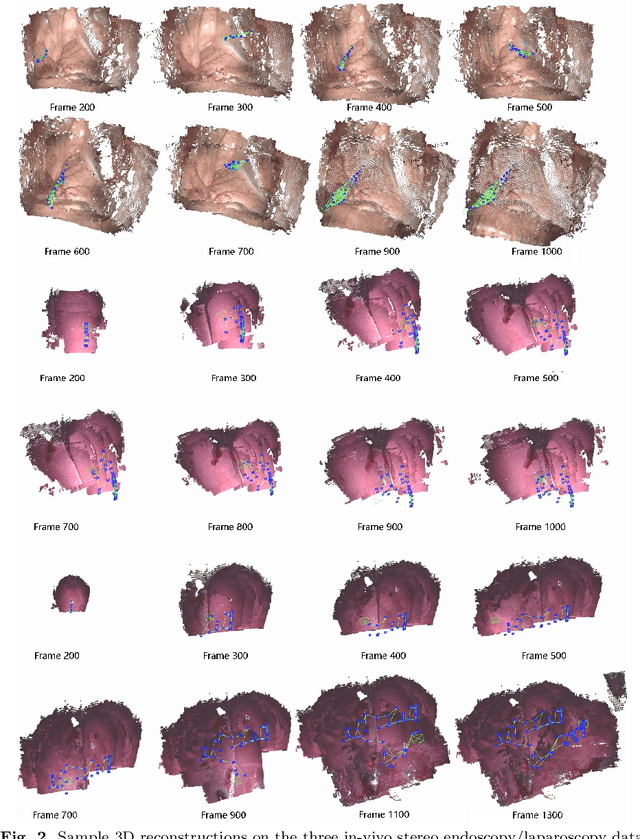
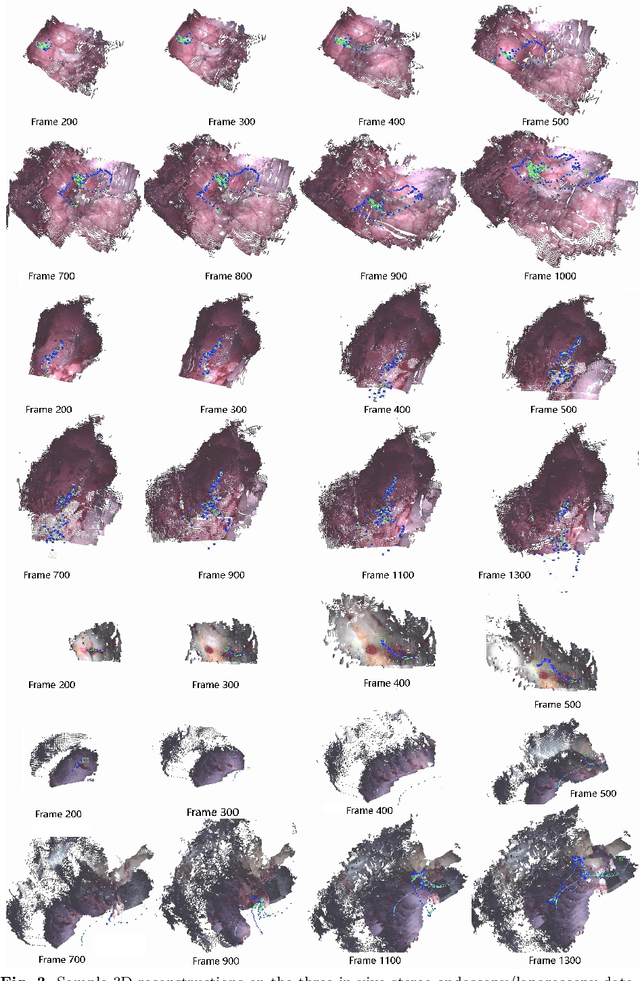
Purpose: Common dense stereo Simultaneous Localization and Mapping (SLAM) approaches in Minimally Invasive Surgery (MIS) require high-end parallel computational resources for real-time implementation. Yet, it is not always feasible since the computational resources should be allocated to other tasks like segmentation, detection, and tracking. To solve the problem of limited parallel computational power, this research aims at a lightweight dense stereo SLAM system that works on a single-core CPU and achieves real-time performance (more than 30 Hz in typical scenarios). Methods: A new dense stereo mapping module is integrated with the ORB-SLAM2 system and named BDIS-SLAM. Our new dense stereo mapping module includes stereo matching and 3D dense depth mosaic methods. Stereo matching is achieved with the recently proposed CPU-level real-time matching algorithm Bayesian Dense Inverse Searching (BDIS). A BDIS-based shape recovery and a depth mosaic strategy are integrated as a new thread and coupled with the backbone ORB-SLAM2 system for real-time stereo shape recovery. Results: Experiments on in-vivo data sets show that BDIS-SLAM runs at over 30 Hz speed on modern single-core CPU in typical endoscopy/colonoscopy scenarios. BDIS-SLAM only consumes around an additional 12% time compared with the backbone ORB-SLAM2. Although our lightweight BDIS-SLAM simplifies the process by ignoring deformation and fusion procedures, it can provide a usable dense mapping for modern MIS on computationally constrained devices. Conclusion: The proposed BDIS-SLAM is a lightweight stereo dense SLAM system for MIS. It achieves 30 Hz on a modern single-core CPU in typical endoscopy/colonoscopy scenarios (image size around 640*480). BDIS-SLAM provides a low-cost solution for dense mapping in MIS and has the potential to be applied in surgical robots and AR systems.