 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Identification of Nonseparable Hamiltonian Systems Using Stochastic Dynamic Models
Paper and Code
Sep 15, 2022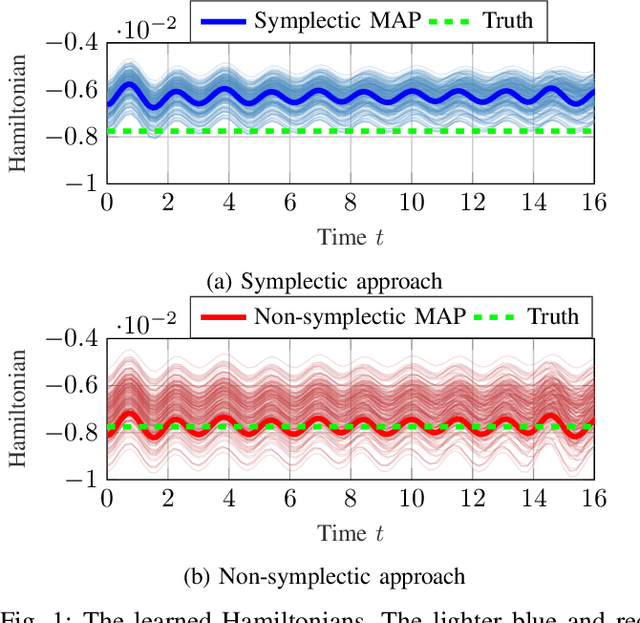
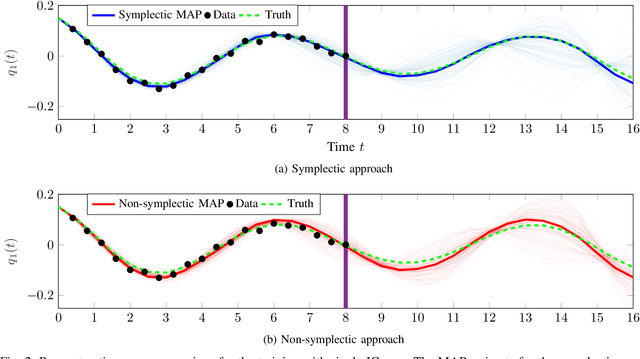
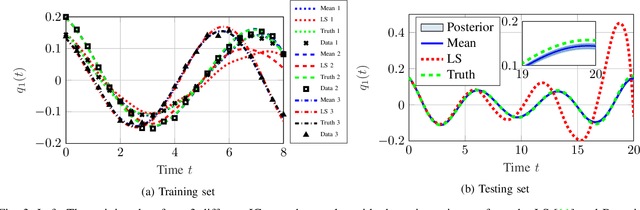
This paper proposes a probabilistic Bayesian formulation for system identification (ID) and estimation of nonseparable Hamiltonian systems using stochastic dynamic models. Nonseparable Hamiltonian systems arise in models from diverse science and engineering applications such as astrophysics, robotics, vortex dynamics, charged particle dynamics, and quantum mechanics. The numerical experiments demonstrate that the proposed method recovers dynamical systems with higher accuracy and reduced predictive uncertainty compared to state-of-the-art approaches. The results further show that accurate predictions far outside the training time interval in the presence of sparse and noisy measurements are possible, which lends robustness and generalizability to the proposed approach. A quantitative benefit is prediction accuracy with less than 10% relative error for more than 12 times longer than a comparable least-squares-based method on a benchmark problem.