 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Exploration and Exploitation in Hierarchical Reinforcement Learning via Latent Landmark Graphs
Paper and Code
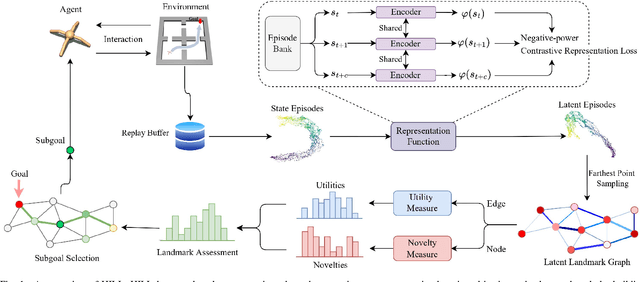
Goal-Conditioned Hierarchical Reinforcement Learning (GCHRL) is a promising paradigm to address the exploration-exploitation dilemma in reinforcement learning. It decomposes the source task into subgoal conditional subtasks and conducts exploration and exploitation in the subgoal space. The effectiveness of GCHRL heavily relies on subgoal representation functions and subgoal selection strategy. However, existing works often overlook the temporal coherence in GCHRL when learning latent subgoal representations and lack an efficient subgoal selection strategy that balances exploration and exploitation. This paper proposes HIerarchical reinforcement learning via dynamically building Latent Landmark graphs (HILL) to overcome these limitations. HILL learns latent subgoal representations that satisfy temporal coherence using a contrastive representation learning objective. Based on these representations, HILL dynamically builds latent landmark graphs and employs a novelty measure on nodes and a utility measure on edges. Finally, HILL develops a subgoal selection strategy that balances exploration and exploitation by jointly considering both measures. Experimental results demonstrate that HILL outperforms state-of-the-art baselines on continuous control tasks with sparse rewards in sample efficiency and asymptotic performance. Our code is available at https://github.com/papercode2022/HILL.