 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot
Paper and Code
Jul 08, 2020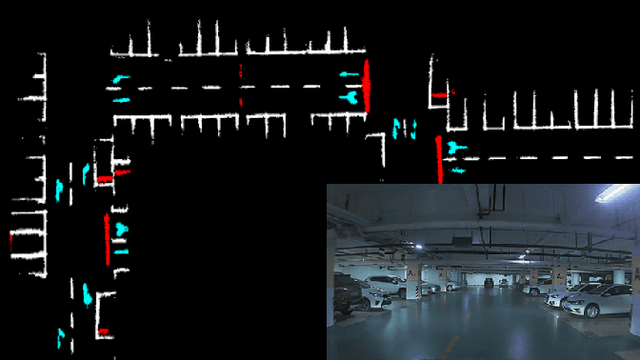
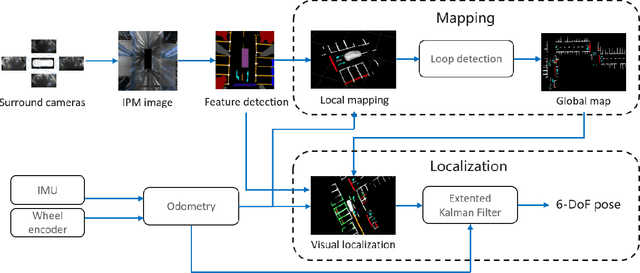
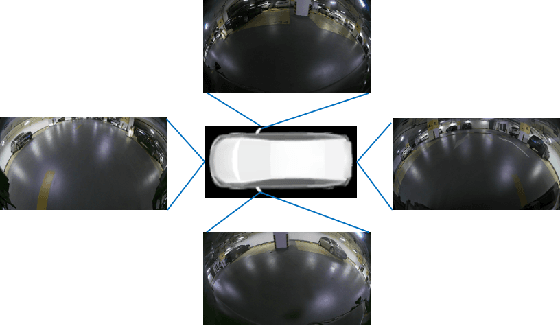
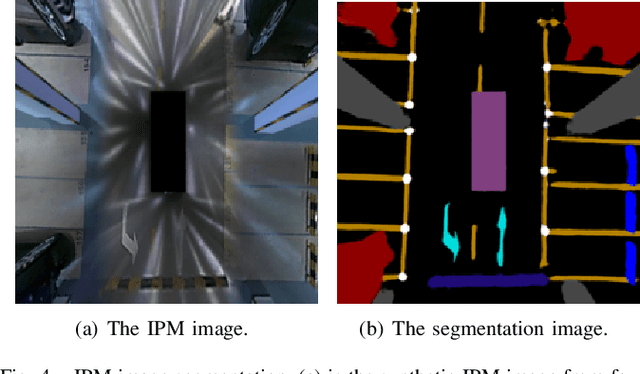
Autonomous valet parking is a specific application for autonomous vehicles. In this task, vehicles need to navigate in narrow, crowded and GPS-denied parking lots. Accurate localization ability is of great importance. Traditional visual-based methods suffer from tracking lost due to texture-less regions, repeated structures, and appearance changes. In this paper, we exploit robust semantic features to build the map and localize vehicles in parking lots. Semantic features contain guide signs, parking lines, speed bumps, etc, which typically appear in parking lots. Compared with traditional features, these semantic features are long-term stable and robust to the perspective and illumination change. We adopt four surround-view cameras to increase the perception range. Assisting by an IMU (Inertial Measurement Unit) and wheel encoders, the proposed system generates a global visual semantic map. This map is further used to localize vehicles at the centimeter level. We analyze the accuracy and recall of our system and compare it against other methods in real experiments. Furthermore, we demonstrate the practicability of the proposed system by the autonomous parking application.