 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoregressive Action Sequence Learning for Robotic Manipulation
Paper and Code
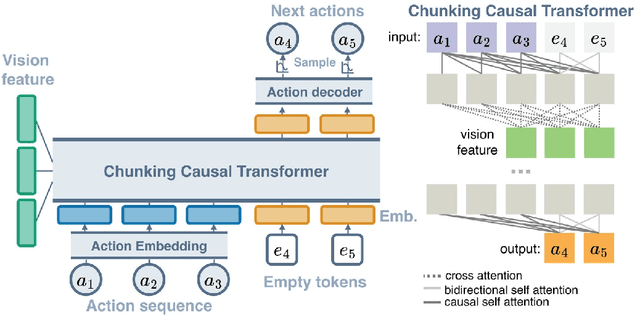



Autoregressive models have demonstrated remarkable success in natural language processing. In this work, we design a simple yet effective autoregressive architecture for robotic manipulation tasks. We propose the Chunking Causal Transformer (CCT), which extends the next-single-token prediction of causal transformers to support multi-token prediction in a single pass. Further, we design a novel attention interleaving strategy that allows CCT to be trained efficiently with teacher-forcing. Based on CCT, we propose the Autoregressive Policy (ARP) model, which learns to generate action sequences autoregressively. We find that action sequence learning enables better leverage of the underlying causal relationships in robotic tasks. We evaluate ARP across diverse robotic manipulation environments, including Push-T, ALOHA, and RLBench, and show that it outperforms the state-of-the-art methods in all tested environments, while being more efficient in computation and parameter sizes. Video demonstrations, our source code, and the models of ARP can be found at http://github.com/mlzxy/arp.