 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Planning Based on Spatial Concepts to Tidy Up Home Environments with Service Robots
Paper and Code
Feb 10, 2020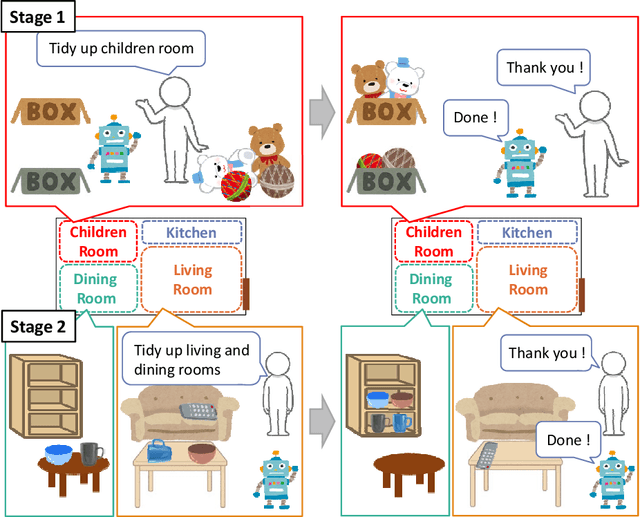
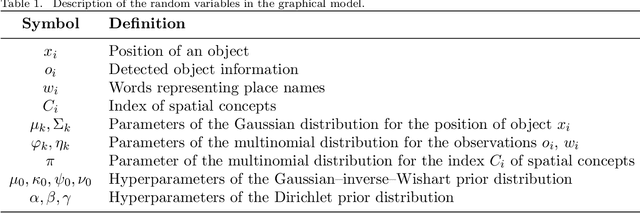
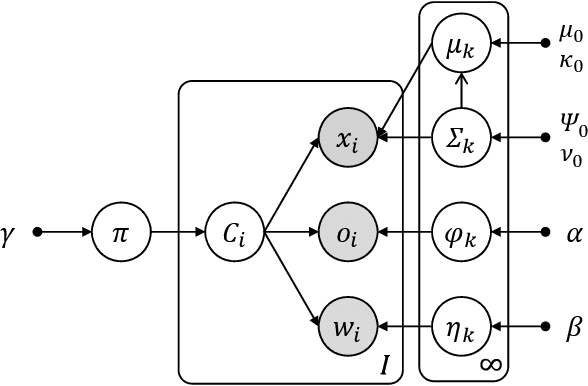
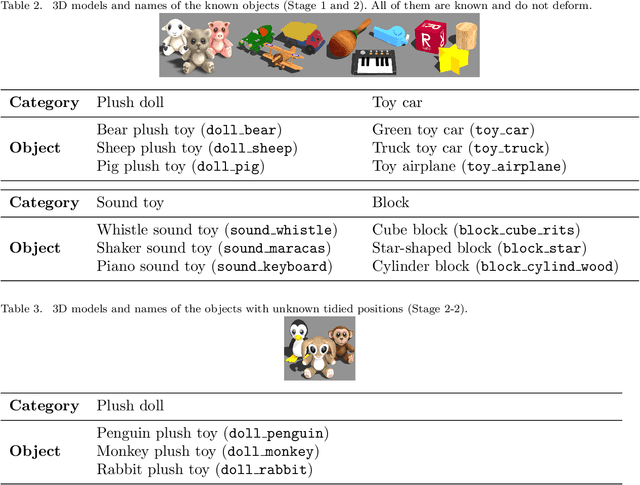
Tidy-up tasks by service robots in home environments are challenging in the application of robotics because they involve various interactions with the environment. In particular, robots are required not only to grasp, move, and release various home objects, but also plan the order and positions where to put them away. In this paper, we propose a novel planning method that can efficiently estimate the order and positions of the objects to be tidied up based on the learning of the parameters of a probabilistic generative model. The model allows the robot to learn the distributions of co-occurrence probability of objects and places to tidy up by using multimodal sensor information collected in a tidied environment. Additionally, we develop an autonomous robotic system to perform the tidy-up operation. We evaluate the effectiveness of the proposed method in an experimental simulation that reproduces the conditions of the Tidy Up Here task of the World Robot Summit international robotics competition. The simulation results showed that the proposed method enables the robot to successively tidy up several objects and achieves the best task score compared to baseline tidy-up methods.