 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Navigation in Complex Environments with Deep Multimodal Fusion Network
Paper and Code
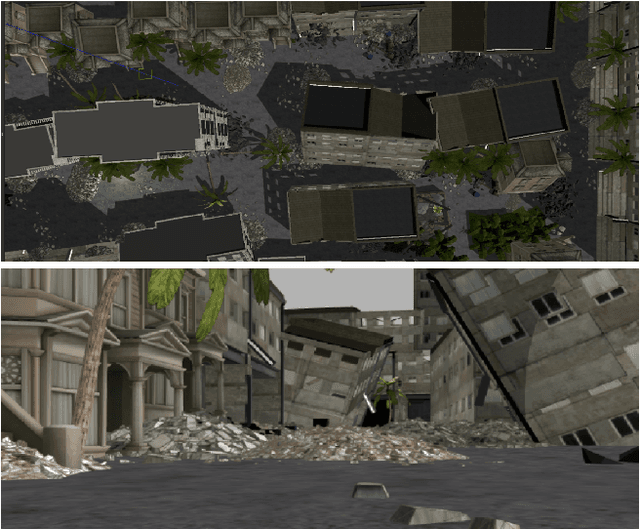
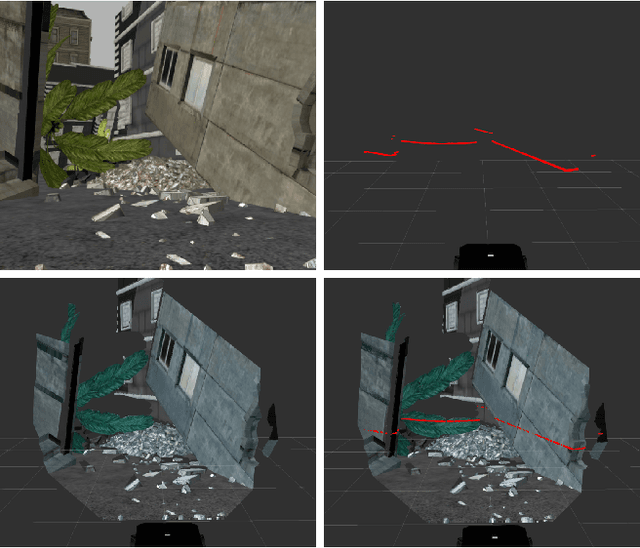
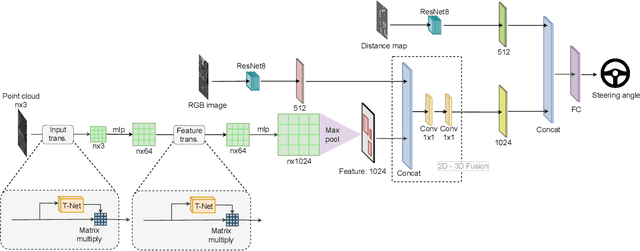
Autonomous navigation in complex environments is a crucial task in time-sensitive scenarios such as disaster response or search and rescue. However, complex environments pose significant challenges for autonomous platforms to navigate due to their challenging properties: constrained narrow passages, unstable pathway with debris and obstacles, or irregular geological structures and poor lighting conditions. In this work, we propose a multimodal fusion approach to address the problem of autonomous navigation in complex environments such as collapsed cites, or natural caves. We first simulate the complex environments in a physics-based simulation engine and collect a large-scale dataset for training. We then propose a Navigation Multimodal Fusion Network (NMFNet) which has three branches to effectively handle three visual modalities: laser, RGB images, and point cloud data. The extensively experimental results show that our NMFNet outperforms recent state of the art by a fair margin while achieving real-time performance. We further show that the use of multiple modalities is essential for autonomous navigation in complex environments. Finally, we successfully deploy our network to both simulated and real mobile robots.