 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomotive RADAR sub-sampling via object detection networks: Leveraging prior signal information
Paper and Code
Feb 21, 2023


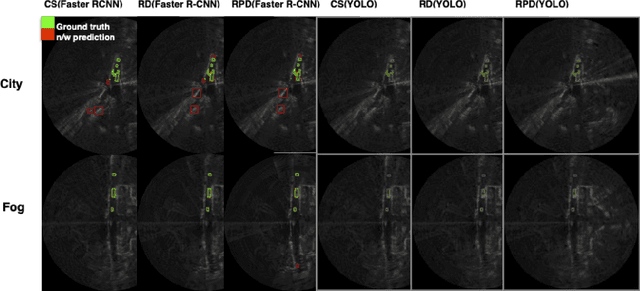
Automotive radar has increasingly attracted attention due to growing interest in autonomous driving technologies. Acquiring situational awareness using multimodal data collected at high sampling rates by various sensing devices including cameras, LiDAR, and radar requires considerable power, memory and compute resources which are often limited at an edge device. In this paper, we present a novel adaptive radar sub-sampling algorithm designed to identify regions that require more detailed/accurate reconstruction based on prior environmental conditions' knowledge, enabling near-optimal performance at considerably lower effective sampling rates. Designed to robustly perform under variable weather conditions, the algorithm was shown on the Oxford raw radar and RADIATE dataset to achieve accurate reconstruction utilizing only 10% of the original samples in good weather and 20% in extreme (snow, fog) weather conditions. A further modification of the algorithm incorporates object motion to enable reliable identification of important regions. This includes monitoring possible future occlusions caused by objects detected in the present frame. Finally, we train a YOLO network on the RADIATE dataset to perform object detection directly on RADAR data and obtain a 6.6% AP50 improvement over the baseline Faster R-CNN network.