 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoJoin: Efficient Adversarial Training for Robust Maneuvering via Denoising Autoencoder and Joint Learning
Paper and Code
May 22, 2022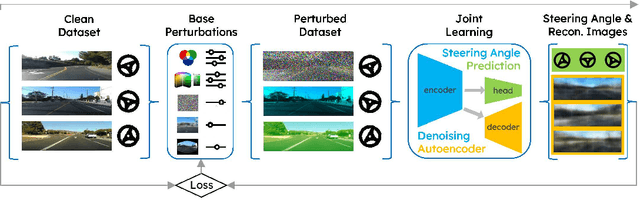
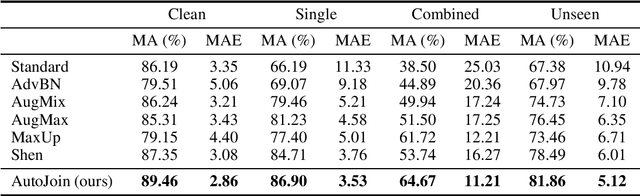
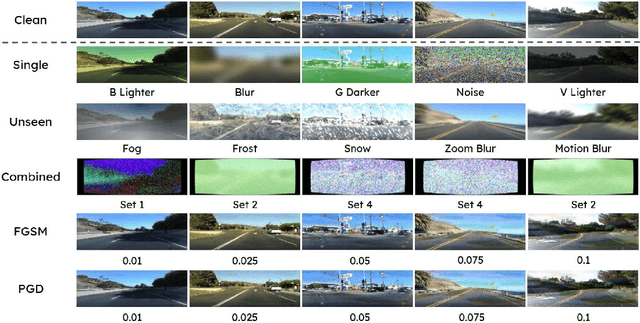
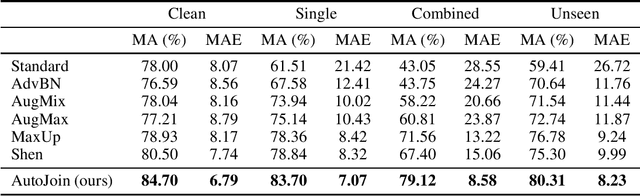
As a result of increasingly adopted machine learning algorithms and ubiquitous sensors, many 'perception-to-control' systems have been deployed in various settings. For these systems to be trustworthy, we need to improve their robustness with adversarial training being one approach. In this work, we propose a gradient-free adversarial training technique, called AutoJoin. AutoJoin is a very simple yet effective and efficient approach to produce robust models for imaged-based autonomous maneuvering. Compared to other SOTA methods with testing on over 5M perturbed and clean images, AutoJoin achieves significant performance increases up to the 40% range under perturbed datasets while improving on clean performance for almost every dataset tested. In particular, AutoJoin can triple the clean performance improvement compared to the SOTA work by Shen et al. Regarding efficiency, AutoJoin demonstrates strong advantages over other SOTA techniques by saving up to 83% time per training epoch and 90% training data. The core idea of AutoJoin is to use a decoder attachment to the original regression model creating a denoising autoencoder within the architecture. This allows the tasks 'steering' and 'denoising sensor input' to be jointly learnt and enable the two tasks to reinforce each other's performance.