Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuto-calibration Method Using Stop Signs for Urban Autonomous Driving Applications
Paper and Code
Oct 14, 2020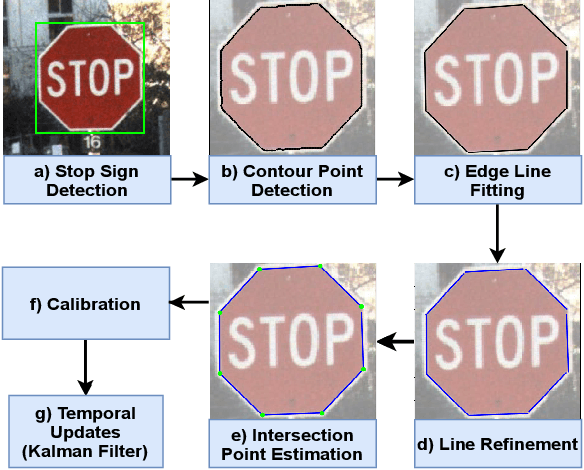
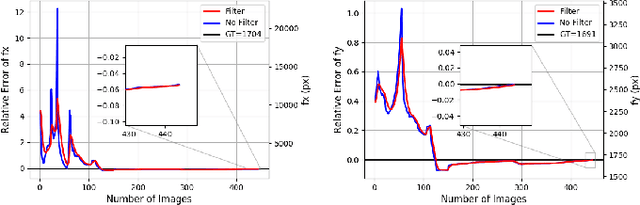
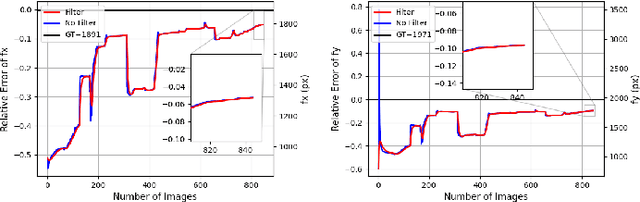
For use of cameras on an intelligent vehicle, driving over a major bump could challenge the calibration. It is then of interest to do dynamic calibration. What structures can be used for calibration? How about using traffic signs that you recognize? In this paper an approach is presented for dynamic camera calibration based on recognition of stop signs. The detection is performed based on convolutional neural networks (CNNs). A recognized sign is modeled as a polygon and matched to a model. Parameters are tracked over time. Experimental results show clear convergence and improved performance for the calibration.
* 8 pages, 15 figures, In review of RA-L/ICRA
View paper on