 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASNets: Deep Learning for Generalised Planning
Paper and Code
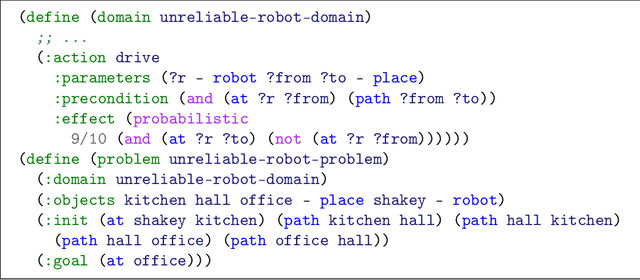



In this paper, we discuss the learning of generalised policies for probabilistic and classical planning problems using Action Schema Networks (ASNets). The ASNet is a neural network architecture that exploits the relational structure of (P)PDDL planning problems to learn a common set of weights that can be applied to any problem in a domain. By mimicking the actions chosen by a traditional, non-learning planner on a handful of small problems in a domain, ASNets are able to learn a generalised reactive policy that can quickly solve much larger instances from the domain. This work extends the ASNet architecture to make it more expressive, while still remaining invariant to a range of symmetries that exist in PPDDL problems. We also present a thorough experimental evaluation of ASNets, including a comparison with heuristic search planners on seven probabilistic and deterministic domains, an extended evaluation on over 18,000 Blocksworld instances, and an ablation study. Finally, we show that sparsity-inducing regularisation can produce ASNets that are compact enough for humans to understand, yielding insights into how the structure of ASNets allows them to generalise across a domain.