 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximating Gradients for Differentiable Quality Diversity in Reinforcement Learning
Paper and Code

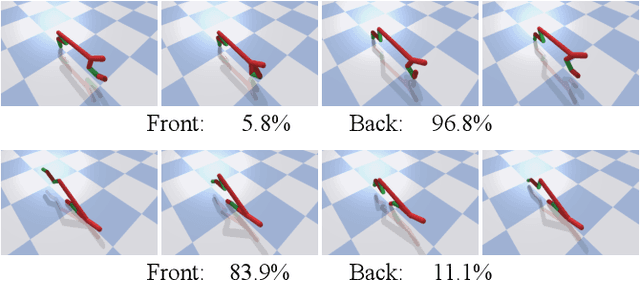

Consider a walking agent that must adapt to damage. To approach this task, we can train a collection of policies and have the agent select a suitable policy when damaged. Training this collection may be viewed as a quality diversity (QD) optimization problem, where we search for solutions (policies) which maximize an objective (walking forward) while spanning a set of measures (measurable characteristics). Recent work shows that differentiable quality diversity (DQD) algorithms greatly accelerate QD optimization when exact gradients are available for the objective and measures. However, such gradients are typically unavailable in RL settings due to non-differentiable environments. To apply DQD in RL settings, we propose to approximate objective and measure gradients with evolution strategies and actor-critic methods. We develop two variants of the DQD algorithm CMA-MEGA, each with different gradient approximations, and evaluate them on four simulated walking tasks. One variant achieves comparable performance (QD score) with the state-of-the-art PGA-MAP-Elites in two tasks. The other variant performs comparably in all tasks but is less efficient than PGA-MAP-Elites in two tasks. These results provide insight into the limitations of CMA-MEGA in domains that require rigorous optimization of the objective and where exact gradients are unavailable.