 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnticipating Human Behavior for Safe Navigation and Efficient Collaborative Manipulation with Mobile Service Robots
Paper and Code
Oct 07, 2024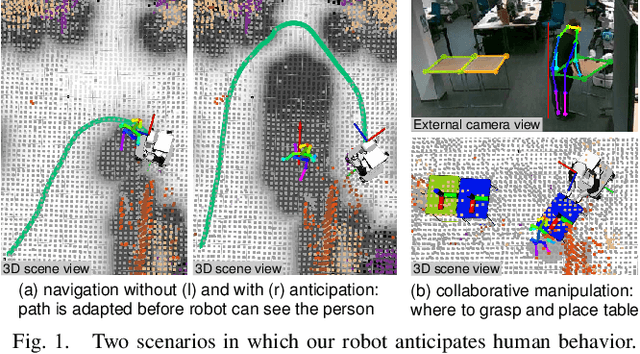
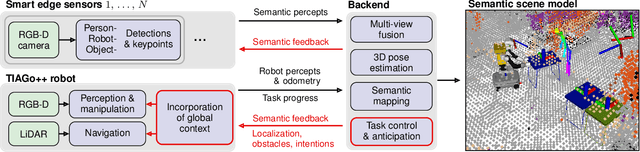
The anticipation of human behavior is a crucial capability for robots to interact with humans safely and efficiently. We employ a smart edge sensor network to provide global observations along with future predictions and goal information to integrate anticipatory behavior for the control of a mobile manipulation robot. We present approaches to anticipate human behavior in the context of safe navigation and a collaborative mobile manipulation task. First, we anticipate human motion by employing projections of human trajectories from smart edge sensor network observations into the planning map of a mobile robot. Second, we anticipate human intentions in a collaborative furniture-carrying task to achieve a given goal. Our experiments indicate that anticipating human behavior allows for safer navigation and more efficient collaboration. Finally, we showcase an integrated system that anticipates human behavior and collaborates with a human to achieve a target room layout, including the placement of tables and chairs.