 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnomaly Detection in Aerial Videos with Transformers
Paper and Code
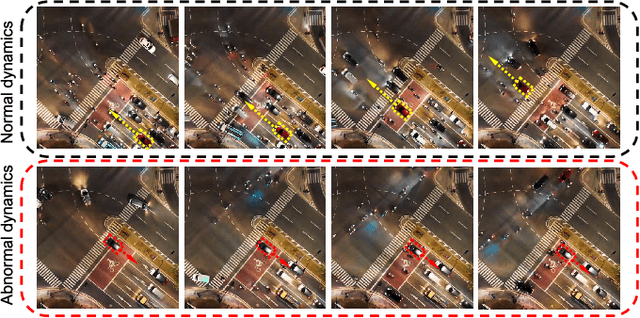

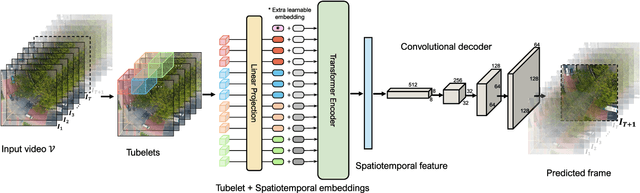
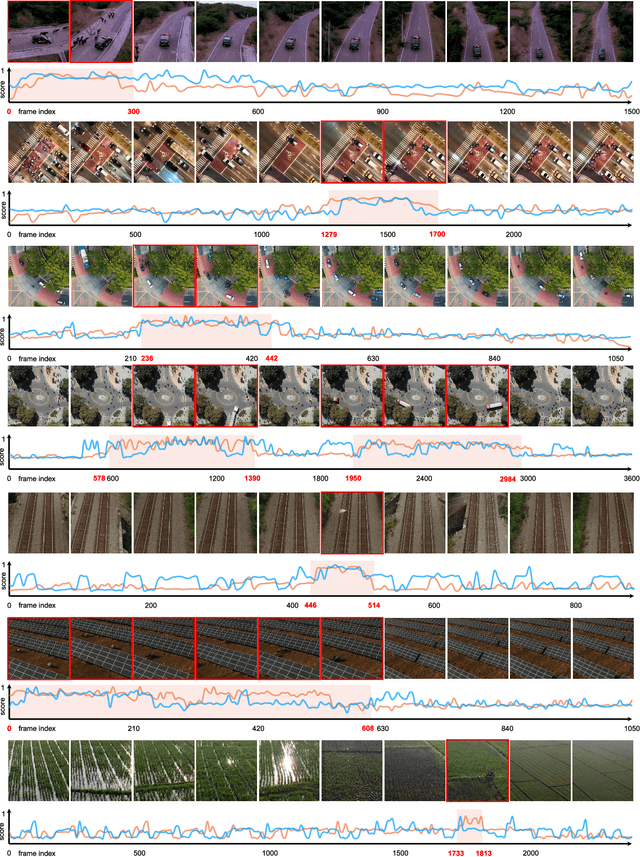
Unmanned aerial vehicles (UAVs) are widely applied for purposes of inspection, search, and rescue operations by the virtue of low-cost, large-coverage, real-time, and high-resolution data acquisition capacities. Massive volumes of aerial videos are produced in these processes, in which normal events often account for an overwhelming proportion. It is extremely difficult to localize and extract abnormal events containing potentially valuable information from long video streams manually. Therefore, we are dedicated to developing anomaly detection methods to solve this issue. In this paper, we create a new dataset, named DroneAnomaly, for anomaly detection in aerial videos. This dataset provides 37 training video sequences and 22 testing video sequences from 7 different realistic scenes with various anomalous events. There are 87,488 color video frames (51,635 for training and 35,853 for testing) with the size of $640 \times 640$ at 30 frames per second. Based on this dataset, we evaluate existing methods and offer a benchmark for this task. Furthermore, we present a new baseline model, ANomaly Detection with Transformers (ANDT), which treats consecutive video frames as a sequence of tubelets, utilizes a Transformer encoder to learn feature representations from the sequence, and leverages a decoder to predict the next frame. Our network models normality in the training phase and identifies an event with unpredictable temporal dynamics as an anomaly in the test phase. Moreover, To comprehensively evaluate the performance of our proposed method, we use not only our Drone-Anomaly dataset but also another dataset. We will make our dataset and code publicly available. A demo video is available at https://youtu.be/ancczYryOBY. We make our dataset and code publicly available .