 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn optimal open-loop strategy for handling a flexible beam with a robot manipulator
Paper and Code

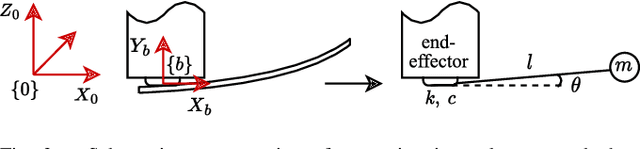
Fast and safe manipulation of flexible objects with a robot manipulator necessitates measures to cope with vibrations. Existing approaches either increase the task execution time or require complex models and/or additional instrumentation to measure vibrations. This paper develops a model-based method that overcomes these limitations. It relies on a simple pendulum-like model for modeling the beam, open-loop optimal control for suppressing vibrations, and does not require any exteroceptive sensors. We experimentally show that the proposed method drastically reduces residual vibrations -- at least 90% -- and outperforms the commonly used input shaping (IS) for the same execution time. Besides, our method can also execute the task faster than IS with a minor reduction in vibration suppression performance. The proposed method facilitates the development of new solutions to a wide range of tasks that involve dynamic manipulation of flexible objects.