 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Learning with Communication in Shared Autonomy
Paper and Code
Mar 18, 2024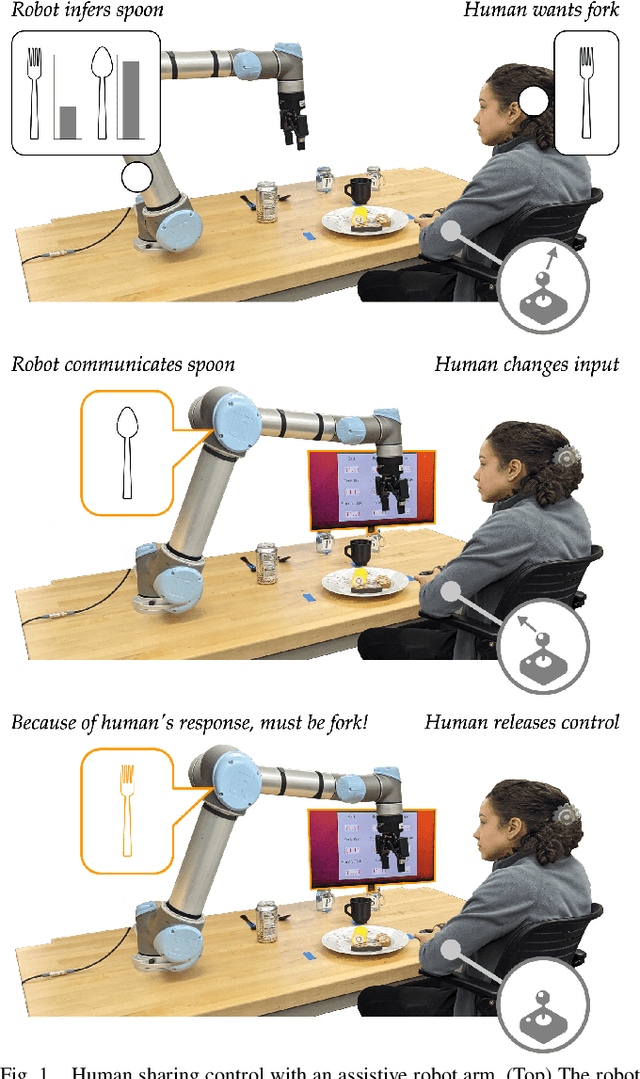
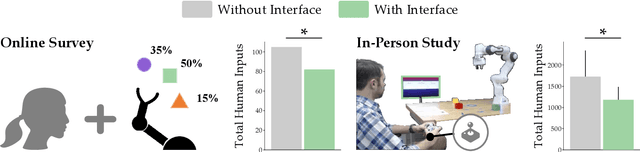
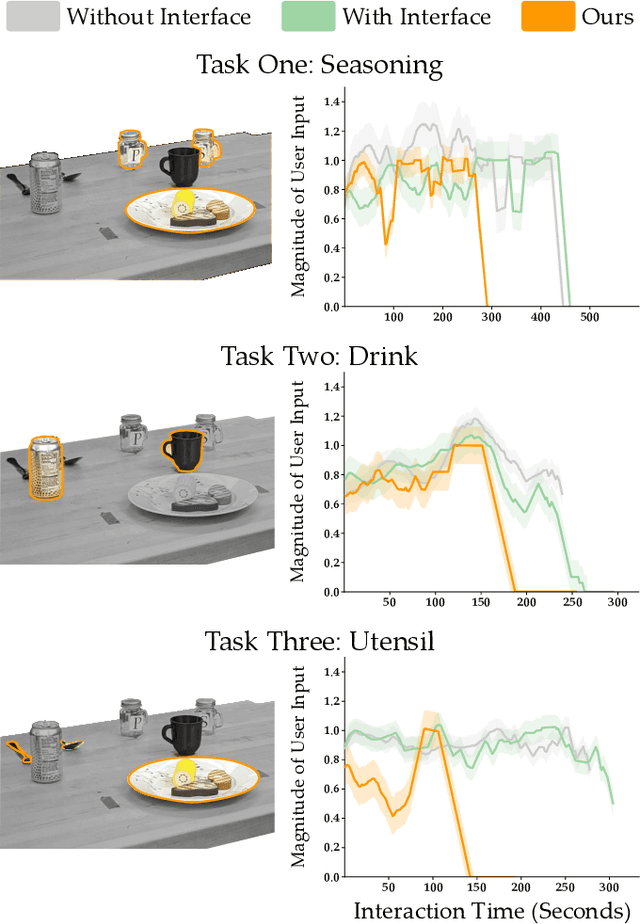
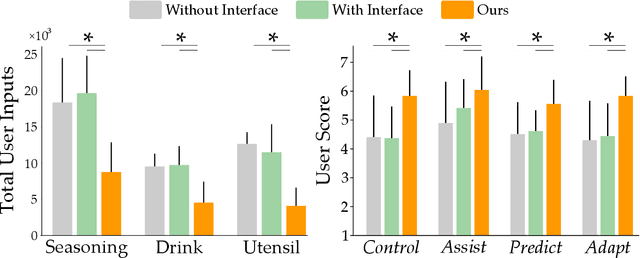
Assistive robot arms can help humans by partially automating their desired tasks. Consider an adult with motor impairments controlling an assistive robot arm to eat dinner. The robot can reduce the number of human inputs -- and how precise those inputs need to be -- by recognizing what the human wants (e.g., a fork) and assisting for that task (e.g., moving towards the fork). Prior research has largely focused on learning the human's task and providing meaningful assistance. But as the robot learns and assists, we also need to ensure that the human understands the robot's intent (e.g., does the human know the robot is reaching for a fork?). In this paper, we study the effects of communicating learned assistance from the robot back to the human operator. We do not focus on the specific interfaces used for communication. Instead, we develop experimental and theoretical models of a) how communication changes the way humans interact with assistive robot arms, and b) how robots can harness these changes to better align with the human's intent. We first conduct online and in-person user studies where participants operate robots that provide partial assistance, and we measure how the human's inputs change with and without communication. With communication, we find that humans are more likely to intervene when the robot incorrectly predicts their intent, and more likely to release control when the robot correctly understands their task. We then use these findings to modify an established robot learning algorithm so that the robot can correctly interpret the human's inputs when communication is present. Our results from a second in-person user study suggest that this combination of communication and learning outperforms assistive systems that isolate either learning or communication.