 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAffine Transport for Sim-to-Real Domain Adaptation
Paper and Code
May 25, 2021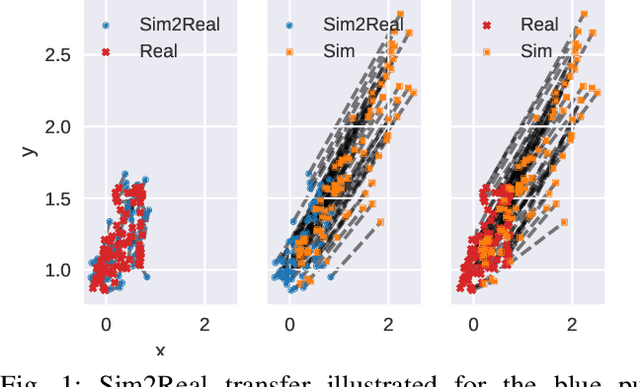
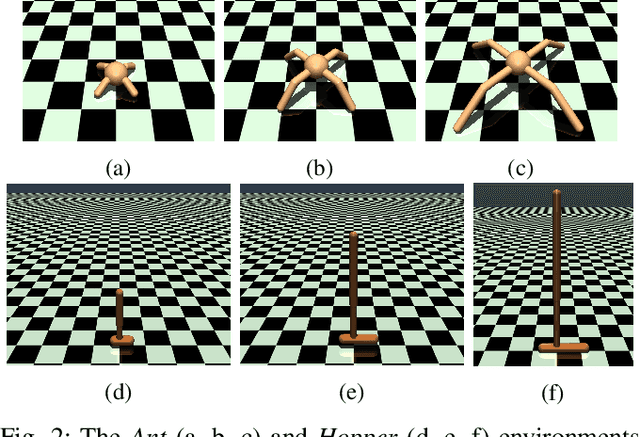
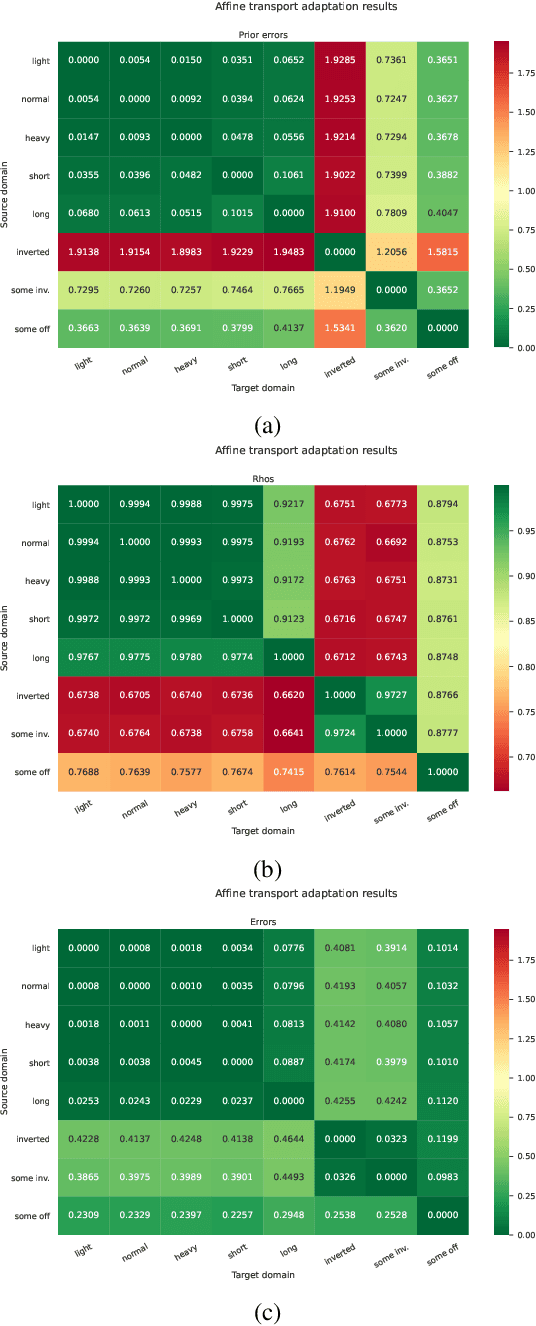
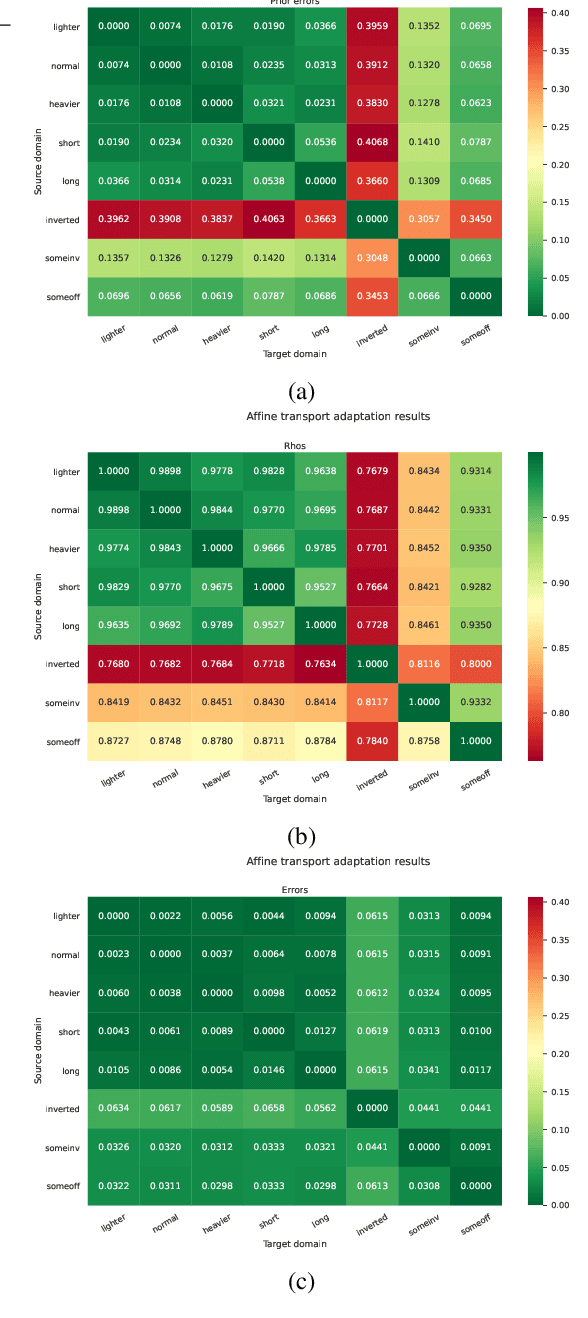
Sample-efficient domain adaptation is an open problem in robotics. In this paper, we present affine transport -- a variant of optimal transport, which models the mapping between state transition distributions between the source and target domains with an affine transformation. First, we derive the affine transport framework; then, we extend the basic framework with Procrustes alignment to model arbitrary affine transformations. We evaluate the method in a number of OpenAI Gym sim-to-sim experiments with simulation environments, as well as on a sim-to-real domain adaptation task of a robot hitting a hockeypuck such that it slides and stops at a target position. In each experiment, we evaluate the results when transferring between each pair of dynamics domains. The results show that affine transport can significantly reduce the model adaptation error in comparison to using the original, non-adapted dynamics model.