 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Skills by Learning Locomotion and Local Navigation End-to-End
Paper and Code
Sep 26, 2022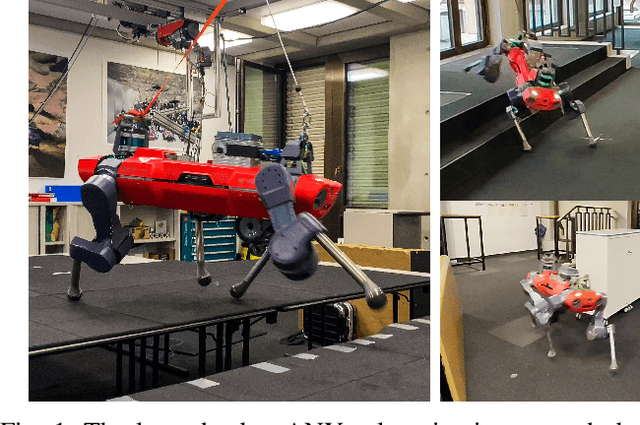
The common approach for local navigation on challenging environments with legged robots requires path planning, path following and locomotion, which usually requires a locomotion control policy that accurately tracks a commanded velocity. However, by breaking down the navigation problem into these sub-tasks, we limit the robot's capabilities since the individual tasks do not consider the full solution space. In this work, we propose to solve the complete problem by training an end-to-end policy with deep reinforcement learning. Instead of continuously tracking a precomputed path, the robot needs to reach a target position within a provided time. The task's success is only evaluated at the end of an episode, meaning that the policy does not need to reach the target as fast as possible. It is free to select its path and the locomotion gait. Training a policy in this way opens up a larger set of possible solutions, which allows the robot to learn more complex behaviors. We compare our approach to velocity tracking and additionally show that the time dependence of the task reward is critical to successfully learn these new behaviors. Finally, we demonstrate the successful deployment of policies on a real quadrupedal robot. The robot is able to cross challenging terrains, which were not possible previously, while using a more energy-efficient gait and achieving a higher success rate.