 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Task Allocation in Multi-Human Multi-Robot Teams under Team Heterogeneity and Dynamic Information Uncertainty
Paper and Code
Sep 20, 2024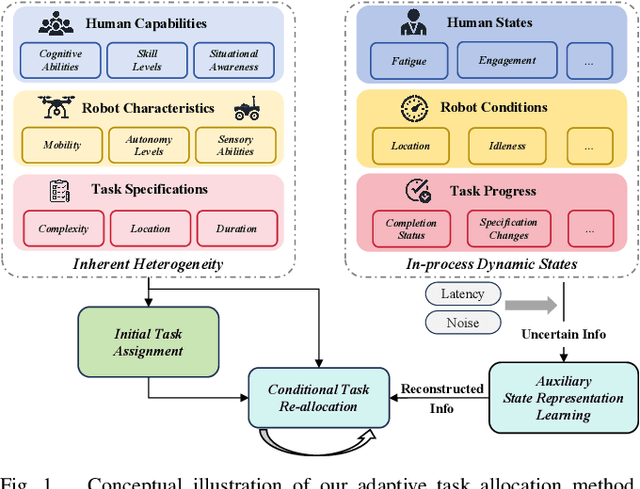
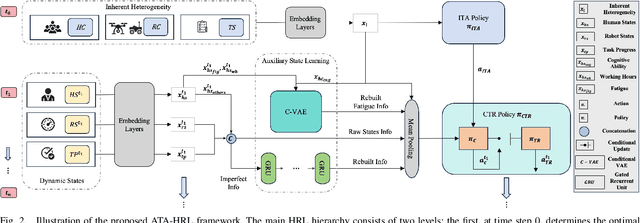

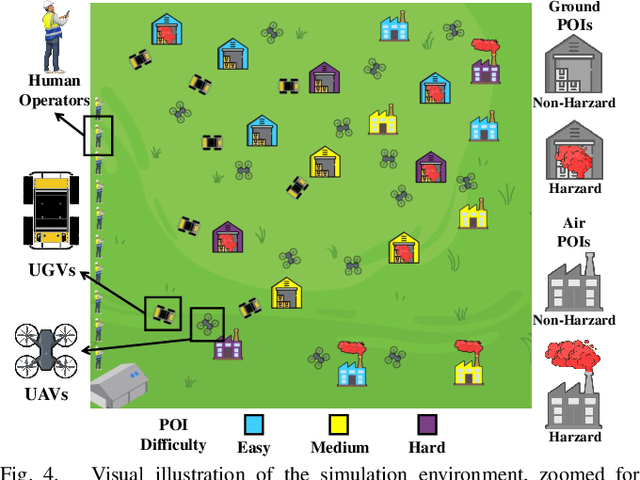
Task allocation in multi-human multi-robot (MH-MR) teams presents significant challenges due to the inherent heterogeneity of team members, the dynamics of task execution, and the information uncertainty of operational states. Existing approaches often fail to address these challenges simultaneously, resulting in suboptimal performance. To tackle this, we propose ATA-HRL, an adaptive task allocation framework using hierarchical reinforcement learning (HRL), which incorporates initial task allocation (ITA) that leverages team heterogeneity and conditional task reallocation in response to dynamic operational states. Additionally, we introduce an auxiliary state representation learning task to manage information uncertainty and enhance task execution. Through an extensive case study in large-scale environmental monitoring tasks, we demonstrate the benefits of our approach.