 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Robot-Assisted Feeding: An Online Learning Framework for Acquiring Previously-Unseen Food Items
Paper and Code
Sep 16, 2019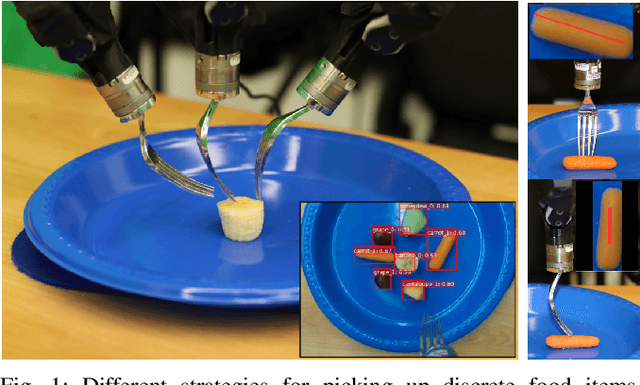
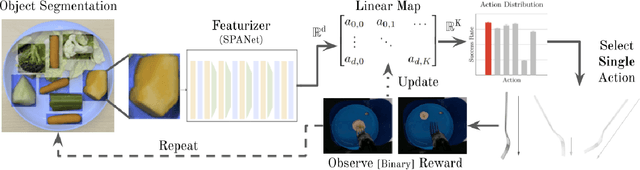
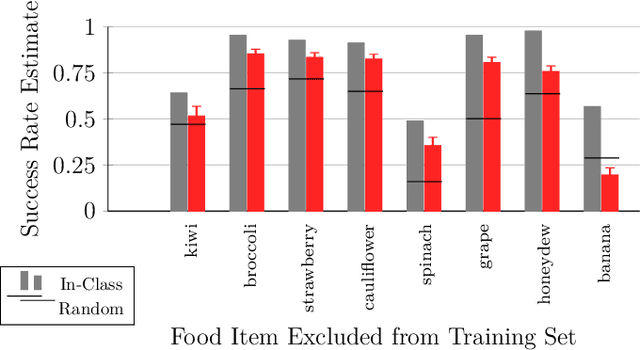
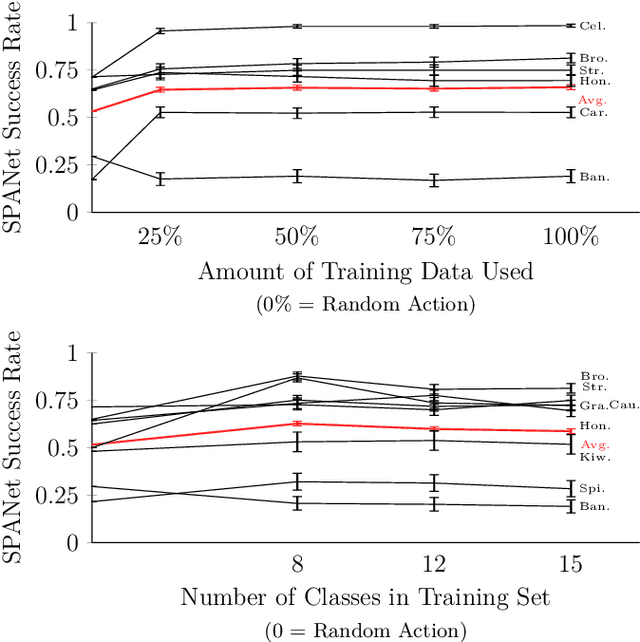
Successful robot-assisted feeding requires bite acquisition of a wide variety of food items. Different food items may require different manipulation actions for successful bite acquisition. Therefore, a key challenge is to handle previously-unseen food items with very different action distributions. By leveraging contexts from previous bite acquisition attempts, a robot should be able to learn online how to acquire those previously-unseen food items. We construct an online learning framework for this problem setting and use the $\epsilon$-greedy and LinUCB contextual bandit algorithms to minimize cumulative regret within that setting. Finally, we demonstrate empirically on a robot-assisted feeding system that this solution can adapt quickly to a food item with an action success rate distribution that differs greatly from previously-seen food items.