 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Lidar Scan Frame Integration: Tracking Known MAVs in 3D Point Clouds
Paper and Code
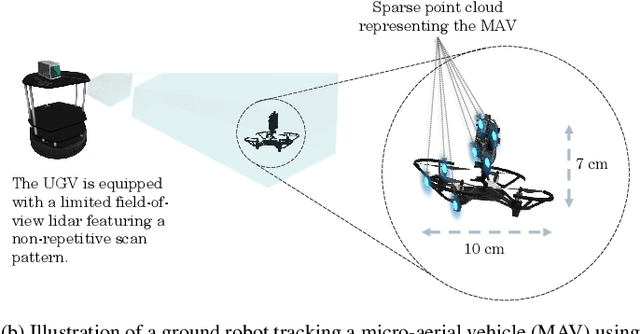
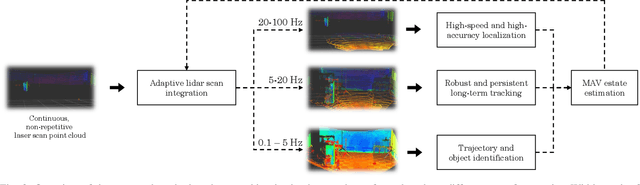
Micro-aerial vehicles (MAVs) are becoming ubiquitous across multiple industries and application domains. Lightweight MAVs with only an onboard flight controller and a minimal sensor suite (e.g., IMU, vision, and vertical ranging sensors) have potential as mobile and easily deployable sensing platforms. When deployed from a ground robot, a key parameter is a relative localization between the ground robot and the MAV. This paper proposes a novel method for tracking MAVs in lidar point clouds. In lidar point clouds, we consider the speed and distance of the MAV to actively adapt the lidar's frame integration time and, in essence, the density and size of the point cloud to be processed. We show that this method enables more persistent and robust tracking when the speed of the MAV or its distance to the tracking sensor changes. In addition, we propose a multi-modal tracking method that relies on high-frequency scans for accurate state estimation, lower-frequency scans for robust and persistent tracking, and sub-Hz processing for trajectory and object identification. These three integration and processing modalities allow for an overall accurate and robust MAV tracking while ensuring the object being tracked meets shape and size constraints.