 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Control based Friction Estimation for Tracking Control of Robot Manipulators
Paper and Code
Sep 08, 2024
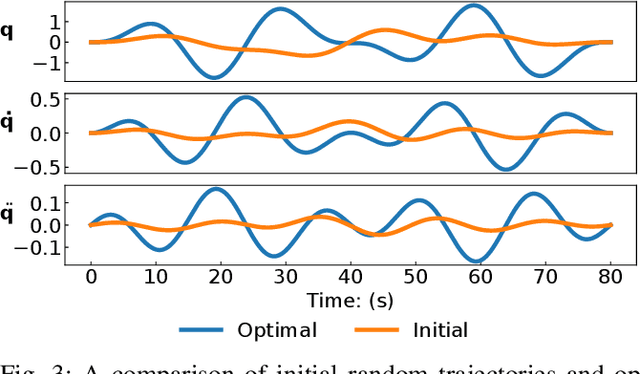
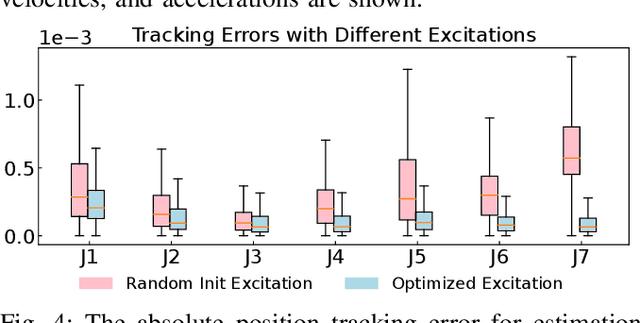
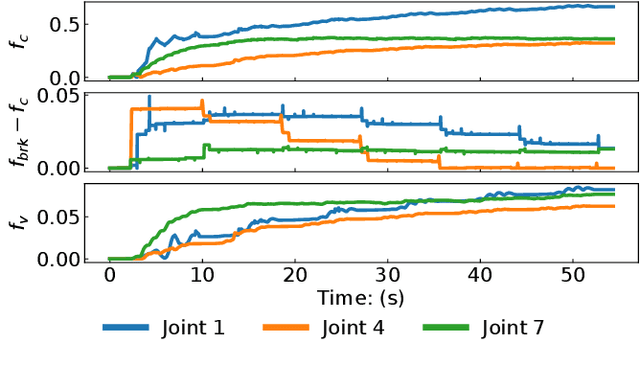
Adaptive control is often used for friction compensation in trajectory tracking tasks because it does not require torque sensors. However, it has some drawbacks: first, the most common certainty-equivalence adaptive control design is based on linearized parameterization of the friction model, therefore nonlinear effects, including the stiction and Stribeck effect, are usually omitted. Second, the adaptive control-based estimation can be biased due to non-zero steady-state error. Third, neglecting unknown model mismatch could result in non-robust estimation. This paper proposes a novel linear parameterized friction model capturing the nonlinear static friction phenomenon. Subsequently, an adaptive control-based friction estimator is proposed to reduce the bias during estimation based on backstepping. Finally, we propose an algorithm to generate excitation for robust estimation. Using a KUKA iiwa 14, we conducted trajectory tracking experiments to evaluate the estimated friction model, including random Fourier and drawing trajectories, showing the effectiveness of our methodology in different control schemes.