 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActiveMoCap: Optimized Drone Flight for Active Human Motion Capture
Paper and Code
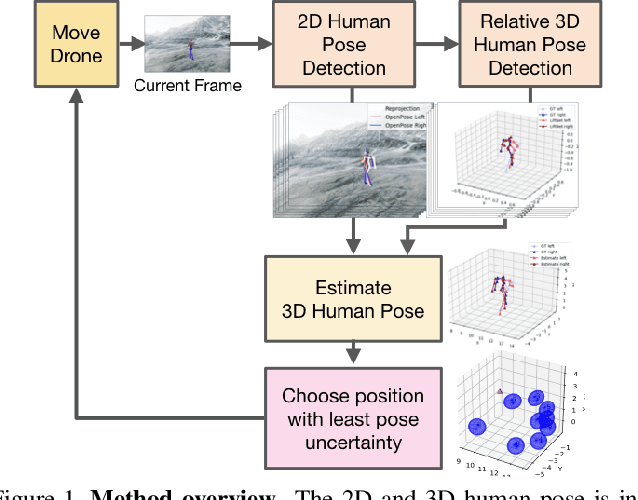

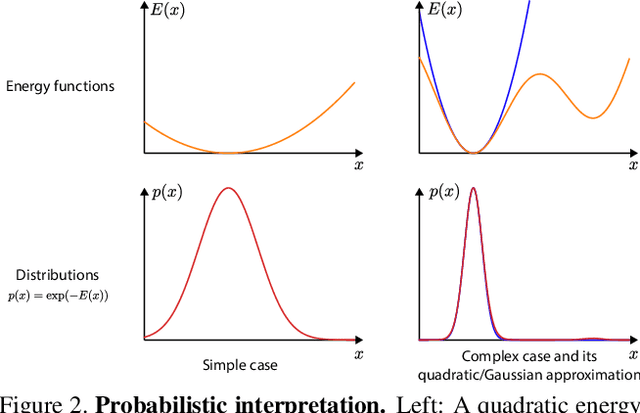
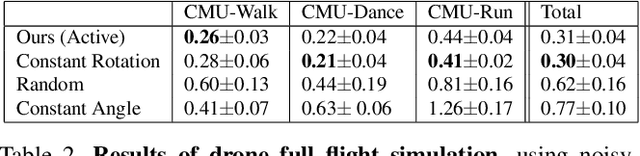
The accuracy of monocular 3D human pose estimation depends on the viewpoint from which the image is captured. While camera-equipped drones provide control over this viewpoint, automatically positioning them at the location which will yield the highest accuracy remains an open problem. This is the problem that we address in this paper. Specifically, given a short video sequence, we introduce an algorithm that predicts the where a drone should go in the future frame so as to maximize 3D human pose estimation accuracy. A key idea underlying our approach is a method to estimate the uncertainty of the 3D body pose estimates. We integrate several sources of uncertainty, originating from a deep learning based regressors and temporal smoothness. The resulting motion planner leads to improved 3D body pose estimates and outperforms or matches existing planners that are based on person following and orbiting.