 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAbsolute Policy Optimization
Paper and Code
Oct 20, 2023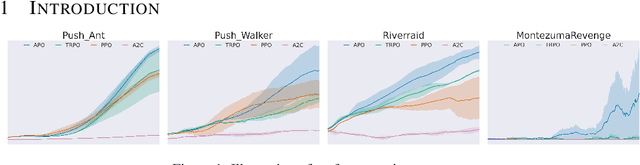

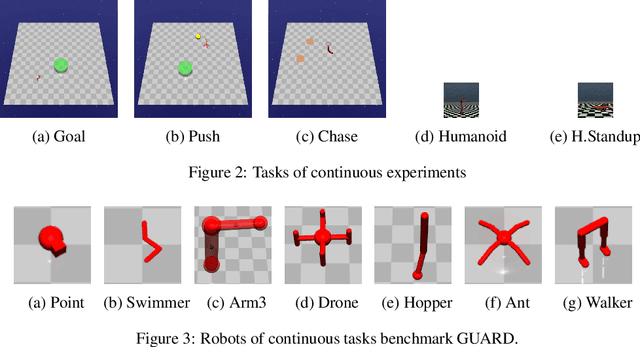
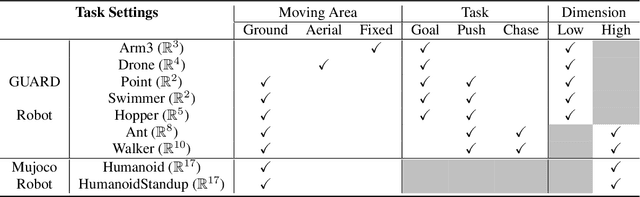
In recent years, trust region on-policy reinforcement learning has achieved impressive results in addressing complex control tasks and gaming scenarios. However, contemporary state-of-the-art algorithms within this category primarily emphasize improvement in expected performance, lacking the ability to control over the worst-case performance outcomes. To address this limitation, we introduce a novel objective function; by optimizing which, it will lead to guaranteed monotonic improvement in the lower bound of near-total performance samples (absolute performance). Considering this groundbreaking theoretical advancement, we then refine this theoretically grounded algorithm through a series of approximations, resulting in a practical solution called Absolute Policy Optimization (APO). Our experiments demonstrate the effectiveness of our approach across challenging continuous control benchmark tasks and extend its applicability to mastering Atari games. Our findings reveal that APO significantly outperforms state-of-the-art policy gradient algorithms, resulting in substantial improvements in both expected performance and worst-case performance.