 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA System for Imitation Learning of Contact-Rich Bimanual Manipulation Policies
Paper and Code

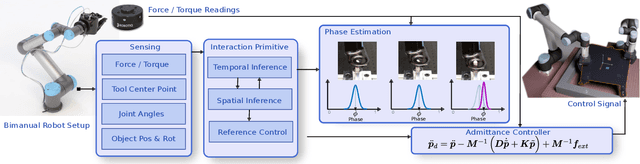
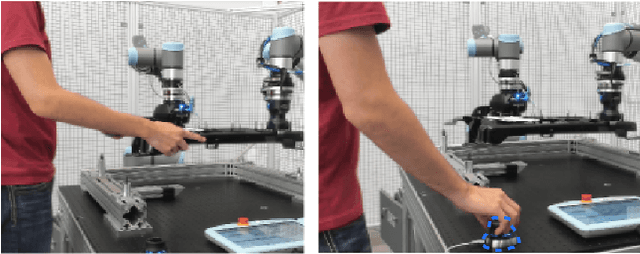
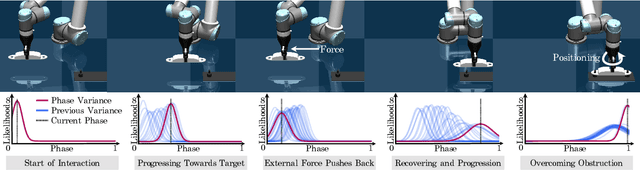
In this paper, we discuss a framework for teaching bimanual manipulation tasks by imitation. To this end, we present a system and algorithms for learning compliant and contact-rich robot behavior from human demonstrations. The presented system combines insights from admittance control and machine learning to extract control policies that can (a) recover from and adapt to a variety of disturbances in time and space, while also (b) effectively leveraging physical contact with the environment. We demonstrate the effectiveness of our approach using a real-world insertion task involving multiple simultaneous contacts between a manipulated object and insertion pegs. We also investigate efficient means of collecting training data for such bimanual settings. To this end, we conduct a human-subject study and analyze the effort and mental demand as reported by the users. Our experiments show that, while harder to provide, the additional force/torque information available in teleoperated demonstrations is crucial for phase estimation and task success. Ultimately, force/torque data substantially improves manipulation robustness, resulting in a 90% success rate in a multipoint insertion task. Code and videos can be found at https://bimanualmanipulation.com/