 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Distributed Optimization Methods for Multi-Robot Systems
Paper and Code
Mar 23, 2021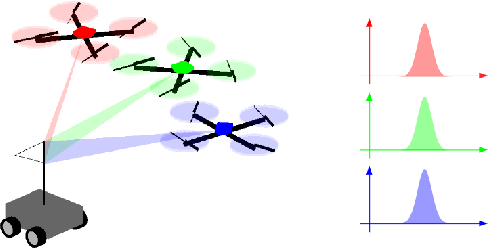
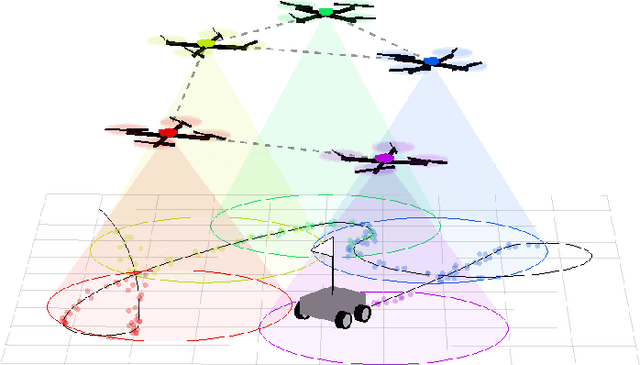
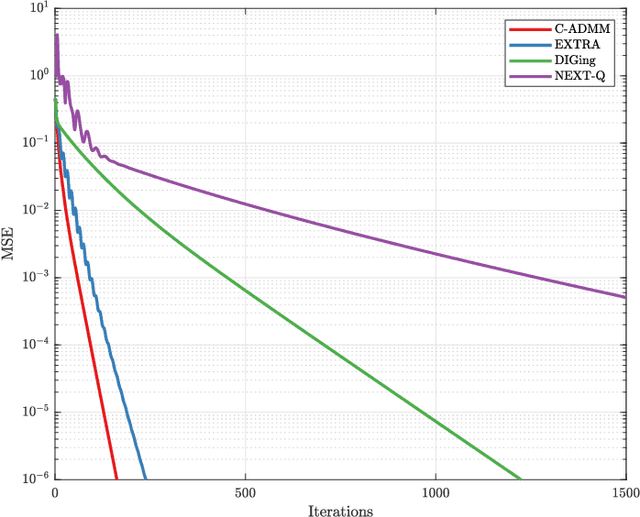
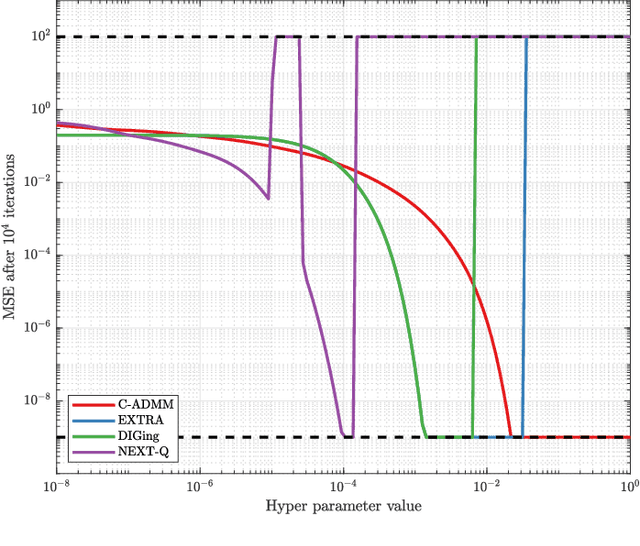
Distributed optimization consists of multiple computation nodes working together to minimize a common objective function through local computation iterations and network-constrained communication steps. In the context of robotics, distributed optimization algorithms can enable multi-robot systems to accomplish tasks in the absence of centralized coordination. We present a general framework for applying distributed optimization as a module in a robotics pipeline. We survey several classes of distributed optimization algorithms and assess their practical suitability for multi-robot applications. We further compare the performance of different classes of algorithms in simulations for three prototypical multi-robot problem scenarios. The Consensus Alternating Direction Method of Multipliers (C-ADMM) emerges as a particularly attractive and versatile distributed optimization method for multi-robot systems.