 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey and Framework of Cooperative Perception: From Heterogeneous Singleton to Hierarchical Cooperation
Paper and Code
Aug 22, 2022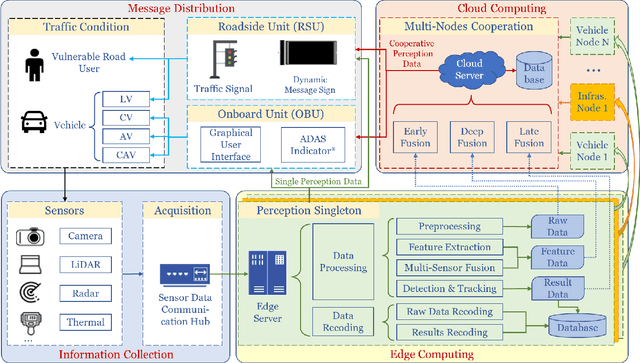
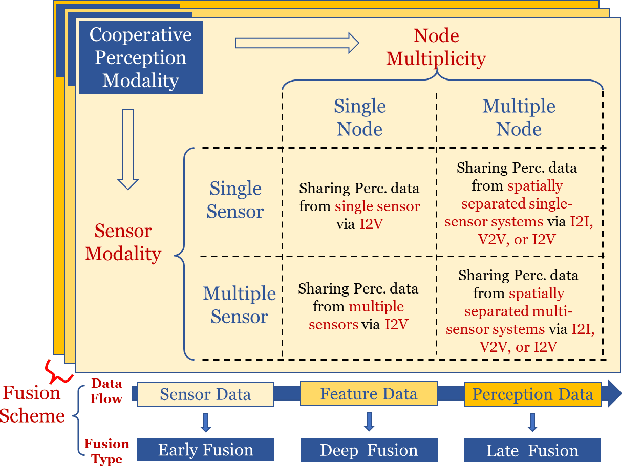
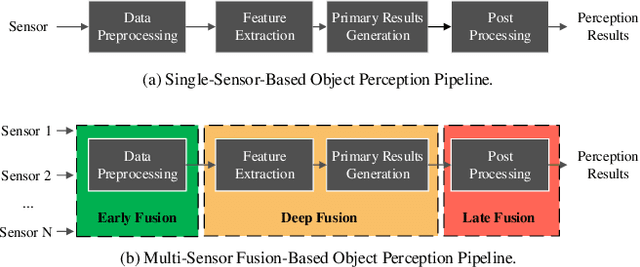
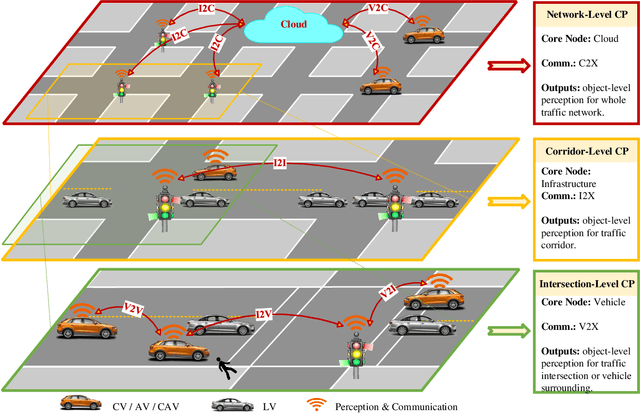
Perceiving the environment is one of the most fundamental keys to enabling Cooperative Driving Automation (CDA), which is regarded as the revolutionary solution to addressing the safety, mobility, and sustainability issues of contemporary transportation systems. Although an unprecedented evolution is now happening in the area of computer vision for object perception, state-of-the-art perception methods are still struggling with sophisticated real-world traffic environments due to the inevitably physical occlusion and limited receptive field of single-vehicle systems. Based on multiple spatially separated perception nodes, Cooperative Perception (CP) is born to unlock the bottleneck of perception for driving automation. In this paper, we comprehensively review and analyze the research progress on CP and, to the best of our knowledge, this is the first time to propose a unified CP framework. Architectures and taxonomy of CP systems based on different types of sensors are reviewed to show a high-level description of the workflow and different structures for CP systems. Node structure, sensor modality, and fusion schemes are reviewed and analyzed with comprehensive literature to provide detailed explanations of specific methods. A Hierarchical CP framework is proposed, followed by a review of existing Datasets and Simulators to sketch an overall landscape of CP. Discussion highlights the current opportunities, open challenges, and anticipated future trends.