 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Strong Baseline for Batch Imitation Learning
Paper and Code
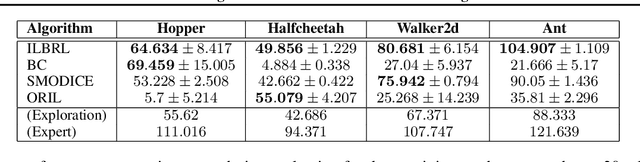
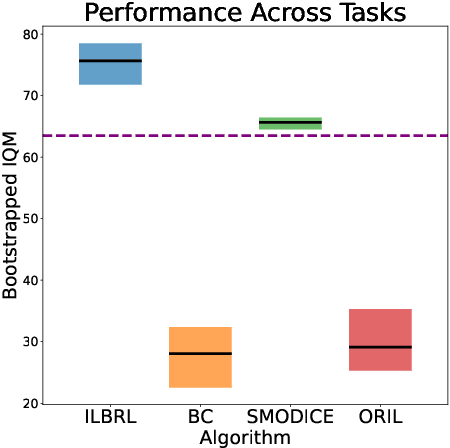
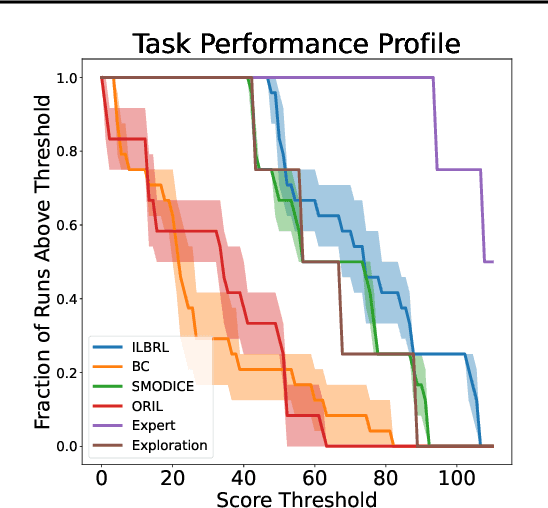
Imitation of expert behaviour is a highly desirable and safe approach to the problem of sequential decision making. We provide an easy-to-implement, novel algorithm for imitation learning under a strict data paradigm, in which the agent must learn solely from data collected a priori. This paradigm allows our algorithm to be used for environments in which safety or cost are of critical concern. Our algorithm requires no additional hyper-parameter tuning beyond any standard batch reinforcement learning (RL) algorithm, making it an ideal baseline for such data-strict regimes. Furthermore, we provide formal sample complexity guarantees for the algorithm in finite Markov Decision Problems. In doing so, we formally demonstrate an unproven claim from Kearns & Singh (1998). On the empirical side, our contribution is twofold. First, we develop a practical, robust and principled evaluation protocol for offline RL methods, making use of only the dataset provided for model selection. This stands in contrast to the vast majority of previous works in offline RL, which tune hyperparameters on the evaluation environment, limiting the practical applicability when deployed in new, cost-critical environments. As such, we establish precedent for the development and fair evaluation of offline RL algorithms. Second, we evaluate our own algorithm on challenging continuous control benchmarks, demonstrating its practical applicability and competitiveness with state-of-the-art performance, despite being a simpler algorithm.