 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Open-Loop Baseline for Reinforcement Learning Locomotion Tasks
Paper and Code
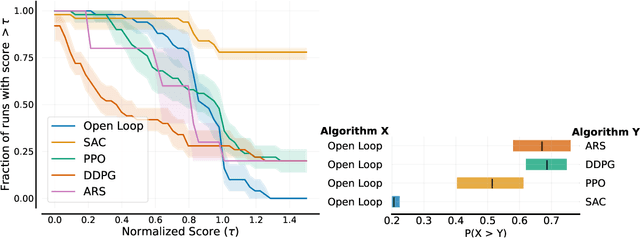

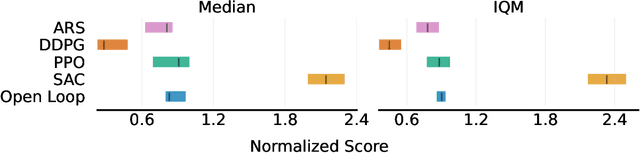

In search of the simplest baseline capable of competing with Deep Reinforcement Learning on locomotion tasks, we propose a biologically inspired model-free open-loop strategy. Drawing upon prior knowledge and harnessing the elegance of simple oscillators to generate periodic joint motions, it achieves respectable performance in five different locomotion environments, with a number of tunable parameters that is a tiny fraction of the thousands typically required by RL algorithms. Unlike RL methods, which are prone to performance degradation when exposed to sensor noise or failure, our open-loop oscillators exhibit remarkable robustness due to their lack of reliance on sensors. Furthermore, we showcase a successful transfer from simulation to reality using an elastic quadruped, all without the need for randomization or reward engineering.