 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Sequential Composition Framework for Coordinating Multi-Robot Behaviors
Paper and Code
Jul 17, 2019


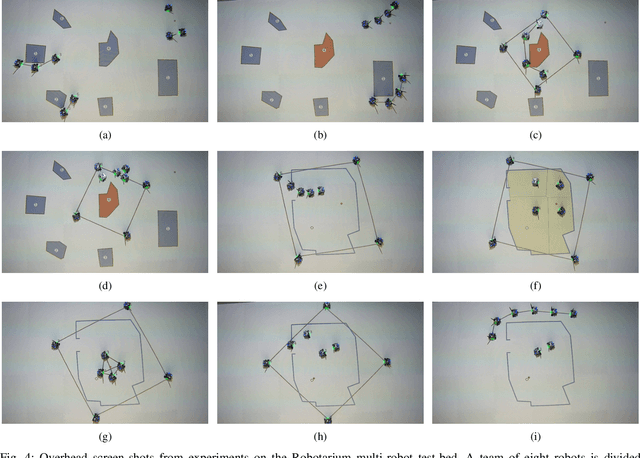
A number of coordinated behaviors have been proposed for achieving specific tasks for multi-robot systems. However, since most applications require more than one such behavior, one needs to be able to compose together sequences of behaviors while respecting local information flow constraints. Specifically, when the inter-agent communication depends on inter-robot distances, these constraints translate into particular configurations that must be reached in finite time in order for the system to be able to transition between the behaviors. To this end, we develop a framework based on finite-time convergence control barrier functions that drives the robots to the required configurations. In order to demonstrate the proposed framework, we consider a scenario where a team of eight planar robots explore an urban environment in order to localize and rescue a subject. The results are presented in the form of a case study, which is implemented on a multi-agent robotic test-bed.