 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robust Object Encoding Method
Paper and Code
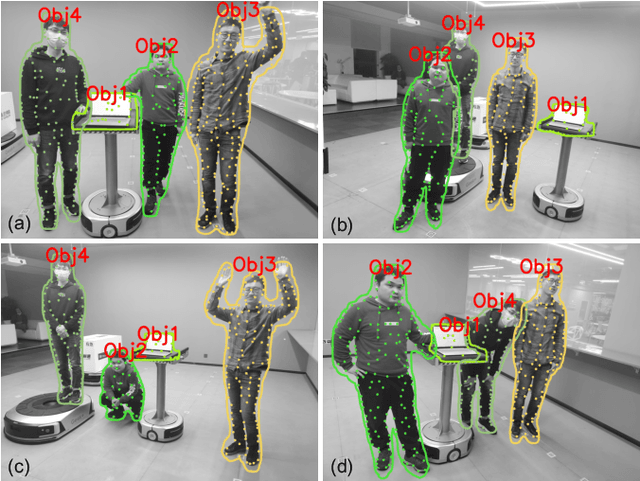
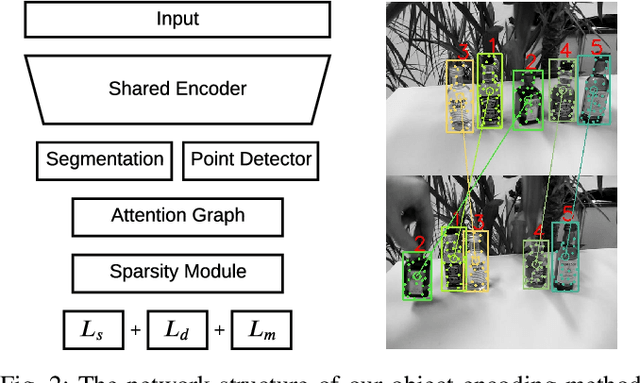
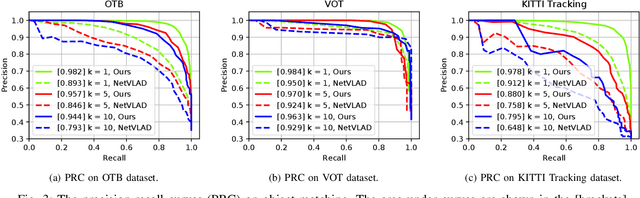
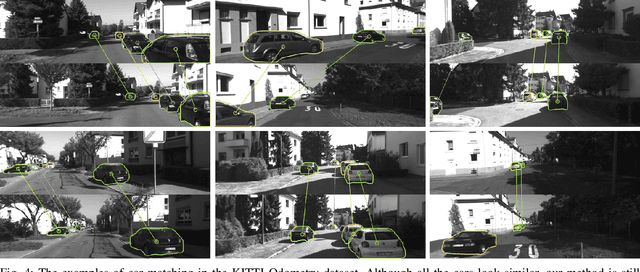
Object encoding and identification is crucial for many robotic tasks such as autonomous exploration and semantic relocalization. Existing works heavily rely on the tracking of detected objects but difficult to recall revisited objects precisely. In this paper, we propose a novel object encoding method based on a graph of key-points. To be robust to the number of key-points detected, we propose a feature sparse encoding and object dense encoding method to ensure that each key-point can only affect a small part of the object descriptors, leading it robust to viewpoint changes, scaling, occlusion, and even object deformation. In the experiments, we show that it achieves superior performance for object identification than the state-of-the art algorithm and is able to provide reliable semantic relocalization. It is a plug-and-play module and we expect that it will play an important role in the robotic applications.