 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reliable Gravity Compensation Control Strategy for dVRK Robotic Arms With Nonlinear Disturbance Forces
Paper and Code
Jan 17, 2020

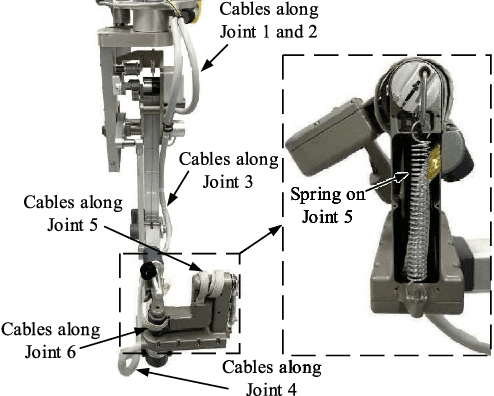

External disturbance forces caused by nonlinear springy electrical cables in the Master Tool Manipulator (MTM) of the da Vinci Research Kit (dVRK) limits the usage of the existing gravity compensation methods. Significant motion drifts at the MTM tip are often observed when the MTM is located far from its identification trajectory, preventing the usage of these methods for the entire workspace reliably. In this paper, we propose a general and systematic framework to address the problems of the gravity compensation for the MTM of the dVRK. Particularly, high order polynomial models were used to capture the highly nonlinear disturbance forces and integrated with the Multi-step Least Square Estimation (MLSE) framework. This method allows us to identify the parameters of both the gravitational and disturbance forces for each link sequentially, preventing residual error passing among the links of the MTM with uneven mass distribution. A corresponding gravity compensation controller was developed to compensate the gravitational and disturbance forces. The method was validated with extensive experiments in the majority of the manipulator's workspace, showing significant performance enhancements over existing methods. Finally, a deliverable software package in MATLAB and C++ was integrated with dVRK and published in the dVRK community for open-source research and development.