 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Real-time Vision Framework for Pedestrian Behavior Recognition and Intention Prediction at Intersections Using 3D Pose Estimation
Paper and Code
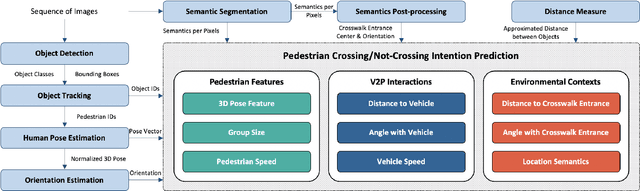
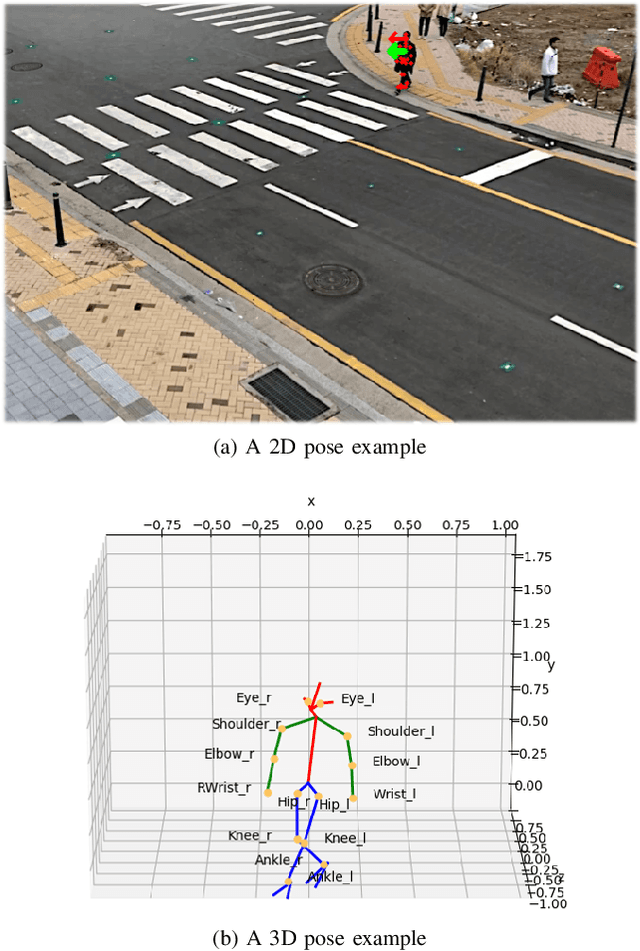
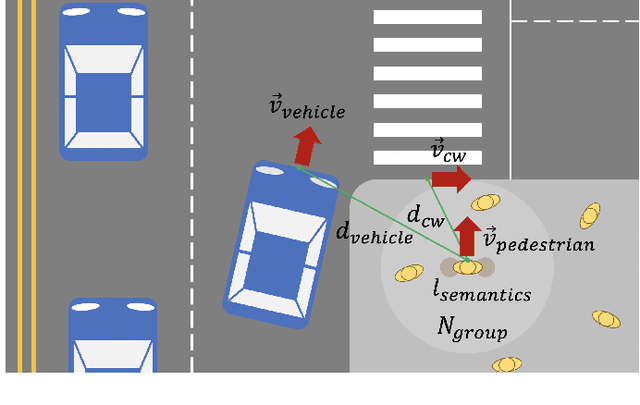
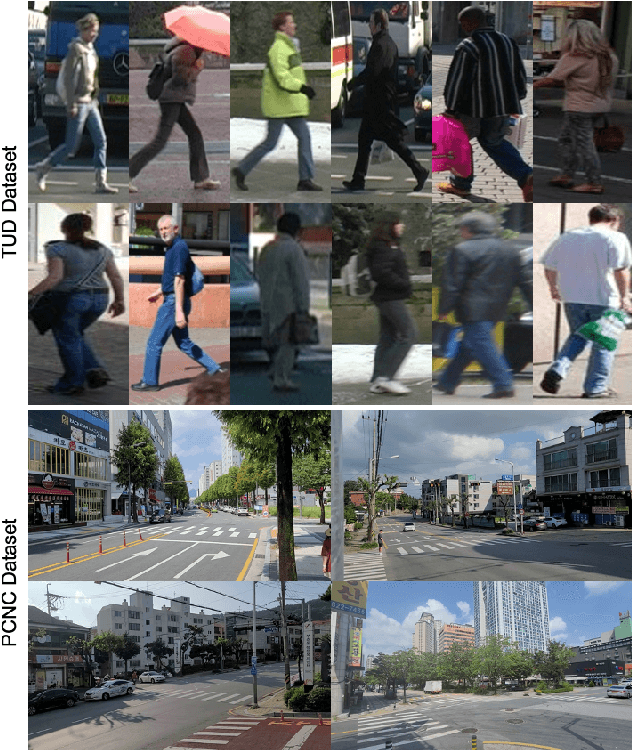
Minimizing traffic accidents between vehicles and pedestrians is one of the primary research goals in intelligent transportation systems. To achieve the goal, pedestrian behavior recognition and prediction of pedestrian's crossing or not-crossing intention play a central role. Contemporary approaches do not guarantee satisfactory performance due to lack of generalization, the requirement of manual data labeling, and high computational complexity. To overcome these limitations, we propose a real-time vision framework for two tasks: pedestrian behavior recognition (100.53 FPS) and intention prediction (35.76 FPS). Our framework obtains satisfying generalization over multiple sites because of the proposed site-independent features. At the center of the feature extraction lies 3D pose estimation. The 3D pose analysis enables robust and accurate recognition of pedestrian behaviors and prediction of intentions over multiple sites. The proposed vision framework realizes 89.3% accuracy in the behavior recognition task on the TUD dataset without any training process and 91.28% accuracy in intention prediction on our dataset achieving new state-of-the-art performance. To contribute to the corresponding research community, we make our source codes public which are available at https://github.com/Uehwan/VisionForPedestrian