Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Q-learning Control Method for a Soft Robotic Arm Utilizing Training Data from a Rough Simulator
Paper and Code
Sep 13, 2021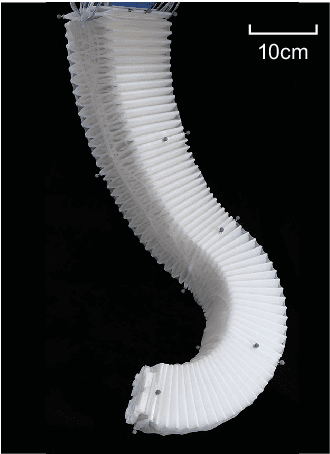
It is challenging to control a soft robot, where reinforcement learning methods have been applied with promising results. However, due to the poor sample efficiency, reinforcement learning methods require a large collection of training data, which limits their applications. In this paper, we propose a Q-learning controller for a physical soft robot, in which pre-trained models using data from a rough simulator are applied to improve the performance of the controller. We implement the method on our soft robot, i.e., Honeycomb Pneumatic Network (HPN) arm. The experiments show that the usage of pre-trained models can not only reduce the amount of the real-world training data, but also greatly improve its accuracy and convergence rate.
* This work has been submitted to the IEEE ROBIO 2021 for possible
publication. Copyright may be transferred without notice, after which this
version may no longer be accessible
View paper on