 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Programmatic and Semantic Approach to Explaining and DebuggingNeural Network Based Object Detectors
Paper and Code
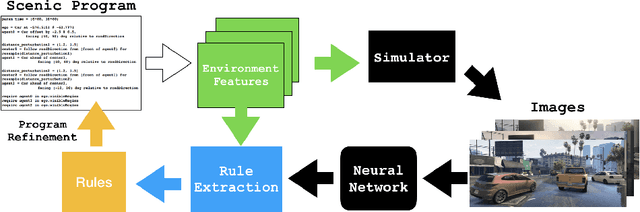
Even as deep neural networks have become very effective for tasks in vision and perception, it remains difficult to explain and debug their behavior. In this paper, we present a programmatic and semantic approach to explaining, understanding, and debugging the correct and incorrect behaviors of a neural network based perception system. Our approach is semantic in that it employs a high-level representation of the distribution of environment scenarios that the detector is intended to work on. It is programmatic in that the representation is a program in a domain-specific probabilistic programming language using which synthetic data can be generated to train and test the neural network. We present a framework that assesses the performance of the neural network to identify correct and incorrect detections, extracts rules from those results that semantically characterizes the correct and incorrect scenarios, and then specializes the probabilistic program with those rules in order to more precisely characterize the scenarios in which the neural network operates correctly or not, without human intervention to identify important features. We demonstrate our results using the SCENIC probabilistic programming language and a neural network-based object detector. Our experiments show that it is possible to automatically generate compact rules that significantly increase the correct detection rate (or conversely the incorrect detection rate) of the network and can thus help with debugging and understanding its behavior.