 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Lightweight Hybrid Graph Convolutional Neural Network -- CNN Scheme for Scene Classification using Object Detection Inference
Paper and Code
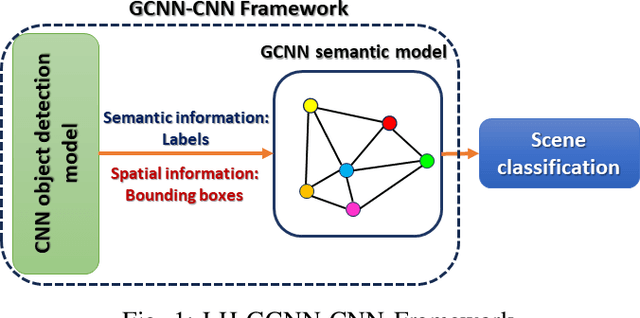
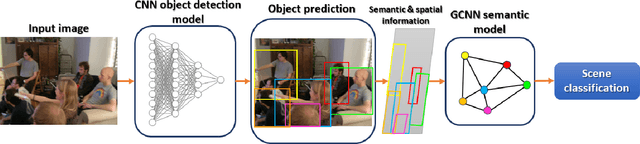
Scene understanding plays an important role in several high-level computer vision applications, such as autonomous vehicles, intelligent video surveillance, or robotics. However, too few solutions have been proposed for indoor/outdoor scene classification to ensure scene context adaptability for computer vision frameworks. We propose the first Lightweight Hybrid Graph Convolutional Neural Network (LH-GCNN)-CNN framework as an add-on to object detection models. The proposed approach uses the output of the CNN object detection model to predict the observed scene type by generating a coherent GCNN representing the semantic and geometric content of the observed scene. This new method, applied to natural scenes, achieves an efficiency of over 90\% for scene classification in a COCO-derived dataset containing a large number of different scenes, while requiring fewer parameters than traditional CNN methods. For the benefit of the scientific community, we will make the source code publicly available: https://github.com/Aymanbegh/Hybrid-GCNN-CNN.